3.3.2 Orienting and securing the robot
General
This section describes how to orient and secure the robot to the base plate or
foundation in order to run the robot safely.
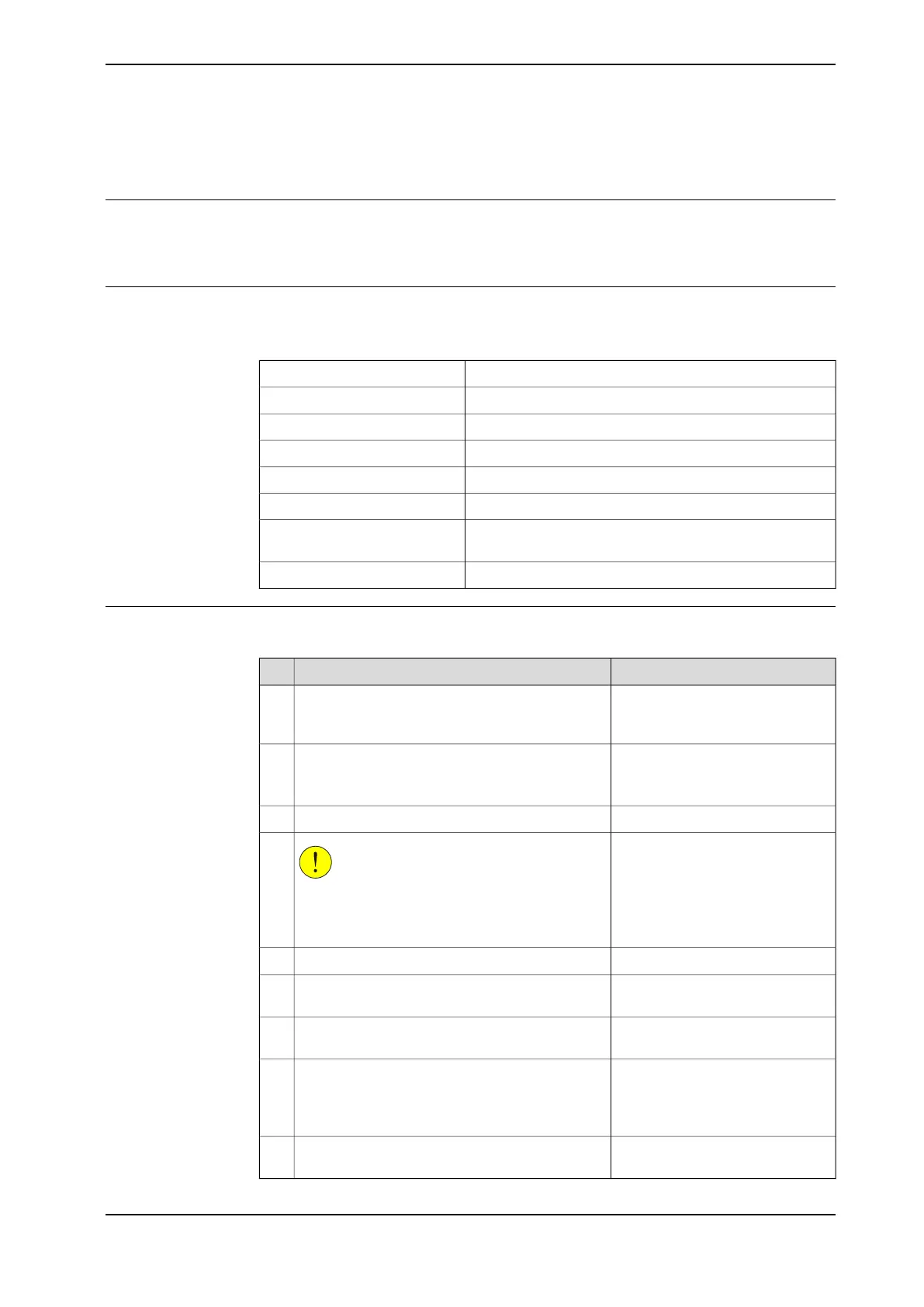
Attachment screws
The table below specifies the type of securing screws and washers to be used for
securing the robot to the base plate/foundation.
M8x30 (robot installation directly on foundation)Suitable screws
4 pcsQuantity
8.8Quality
8.4 x 16 x 1.6Suitable washer
2 pcs, D6x20, ISO 2338 - 6m6x20 - A1Guide pins
20 Nm±2 NmTightening torque
Minimum 14 mm for ground with material yield strength
150 MPa
Length of thread engagement
0.1/500 mmLevel surface requirements
Securing a floor mounted robot
Use this procedure to orient and secure the robot floor mounted.
NoteAction
Make sure the installation site for the robot con-
forms to the specifications in section Technical
data on page 38.
1
The hole configuration of the base
is shown in the figure in Hole con-
figuration, base on page 54.
Prepare the installation site with attachment holes.
The foundation surface must be clean and un-
painted.
2
3
CAUTION
When the robot is put down after being lifted or
transported, there is a risk of it tipping, if not
properly secured.
4
See Lifting the robot on page 50.Lift the robot.5
2 pcs, D6x20, ISO 2338 - 6m6x20
- A1
Fit two pins to the holes in the base.6
Make sure the robot base is cor-
rectly fitted onto the pins.
Guide the robot gently, using the attachment
screws while lowering it into its mounting position.
7
Screws: M8x30 (robot installation
directly on foundation), 4 pcs,
quality 8.8
Fit the securing screws and washers in the attach-
ment holes of the base.
8
Washers: 8.4 x 16 x 1.6
Tightening torque: 20 Nm±2 NmTighten the bolts in a crosswise pattern to ensure
that the base is not distorted.
9
Continues on next page
Product manual - IRB 1010 53
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.2 Orienting and securing the robot
 Loading...
Loading...








