3.4.3 Installing movable mechanical stops on axis 1
Reduction of the axis-1 working range
The working range of axis 1 is limited by system parameter configuration. To reduce
the working range from default range, first adjust the parameter values and then
install additional mechanical stops as a safety measure.
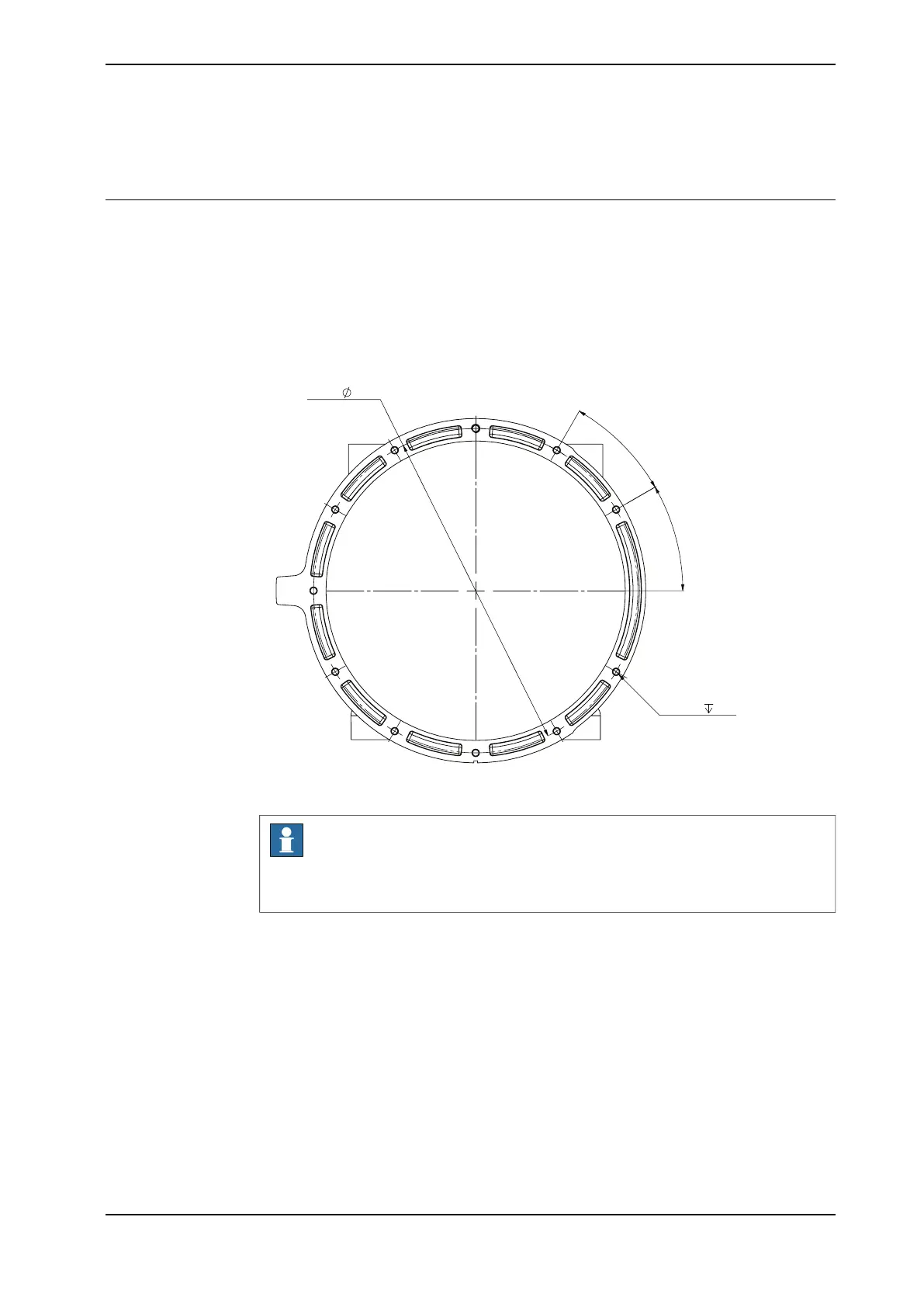
Additional mechanical stops shall be designed according to actual application and
site requirements. Refer to the following hole dimension on swing bottom to prepare
the stops.
PCD
130
10x30°
30°
11xM3
5.5
xx2200001082
Note
Additional mechanical stops are not delivered with the robot. Contact ABB for
more information.
Product manual - IRB 1010 73
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.4.3 Installing movable mechanical stops on axis 1
 Loading...
Loading...








