3.5.2 Customer connections
Introduction to customer connections
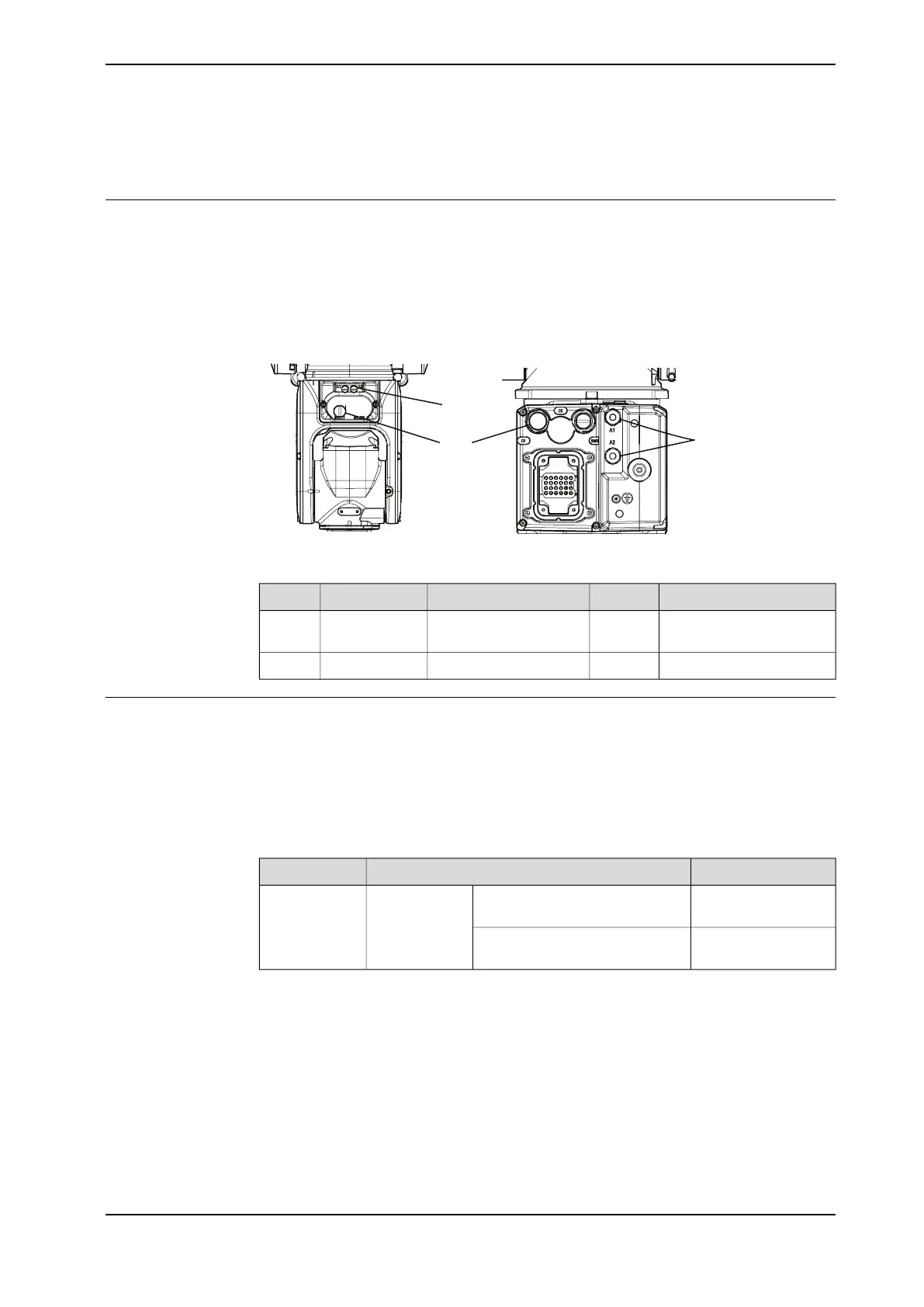
The cables for customer connection are integrated in the robot and the connectors
are placed on the wrist and at the base. There is one connector R2.C1 at the wrist.
Corresponding connector R1.C1 is located at the base.
Hose for compressed air is also integrated into the manipulator. There are 2 inlets
at the base (R1/8”) and 2 outlets (M5) on the wrist.
xx2200000194
ValueNumberDescriptionConnectionPosition
Outer diameter of air hose:
4 mm
2Max. 5 barAirA
30 V, 1.54 A12 wiresCustomer power/signal(R1)R2.C1B
Connector kits (optional)
Connector kits, base
R1.C1 connector on the base is part of the CP/CS cable. For details about the robot
cabling, see Robot cabling and connection points on page 74.
Connector kits, wrist
The table describes the CP/CS connector kits for wrist.
Art. no.DescriptionPosition
3HAC066098-001M12 CPCS Male straight connect-
or kits
CP/CSConnector kits
3HAC066099-001M12 CPCS Male angled connector
kits
Continues on next page
Product manual - IRB 1010 77
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.5.2 Customer connections
 Loading...
Loading...








