2.4 Working range
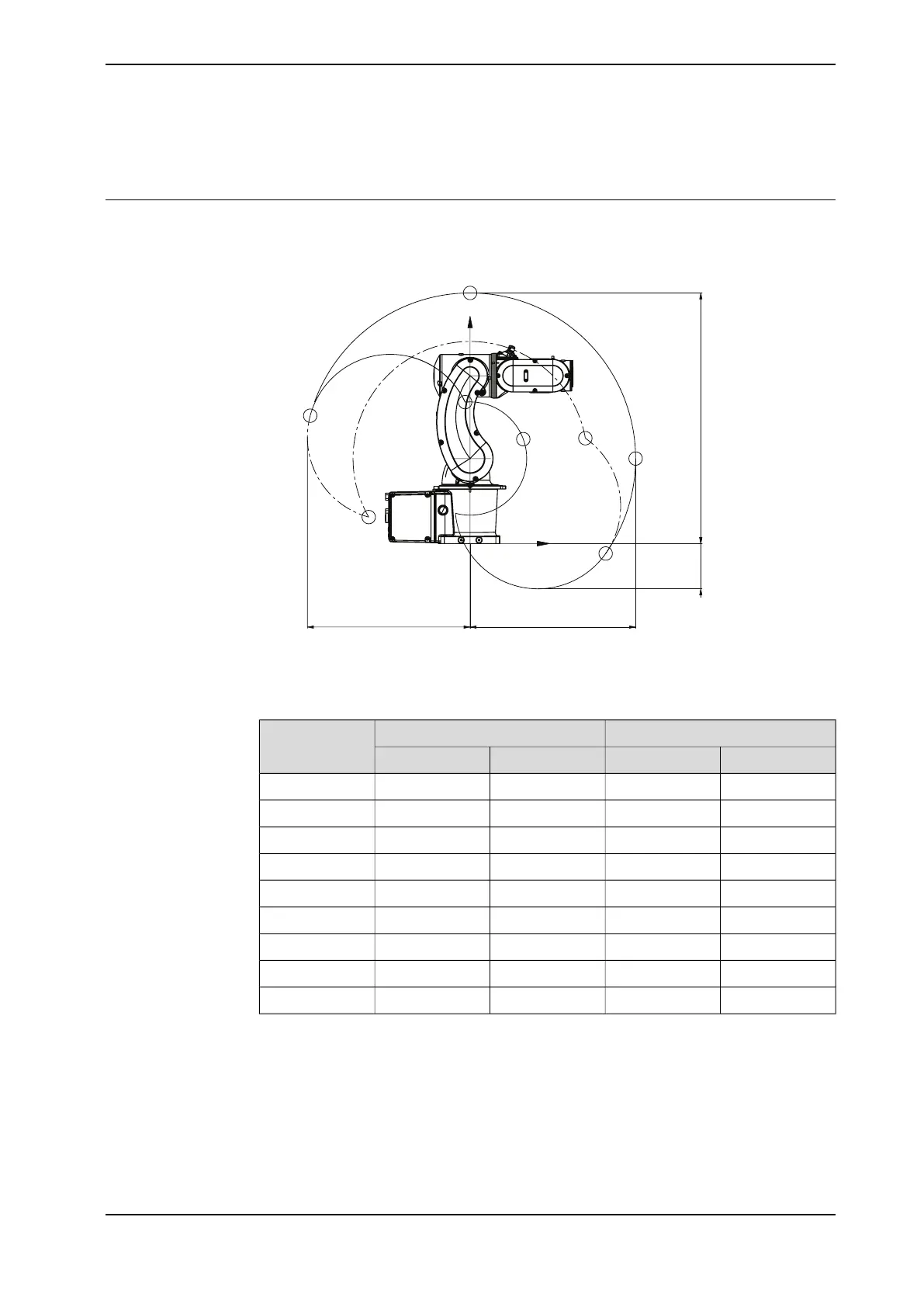
Illustration, working range IRB 1010-1.5/0.370
This illustration shows the unrestricted working range of the robot.
560 101,1
370 363,7
Pos 1
Pos 3
Pos 8
Pos 2
Pos 7
Pos 6
X
Pos 4
Z
Pos 5
xx2200000192
Positions at wrist center and angle of axes 2 and 3
Angle (degrees)Positions at wrist center (mm)Position in the
figure
axis 3axis 2ZX
0°0°+375+185pos0
-90°0°+5600pos1
+50°0°+233.3+118.9pos2
-90°+90°+190+370pos3
-90°+125°-22.2+303.1pos4
-180°+125°+225.6+270.5pos5
-180°-75°+59.2-226.6pos6
+50°-75°+316.1-11.0pos7
-90°-75°+285.8-357.4pos8
Continues on next page
Product manual - IRB 1010 43
3HAC081964-001 Revision: B
© Copyright 2022 ABB. All rights reserved.
2 Manipulator description
2.4 Working range
 Loading...
Loading...








