ASDA Series Application Note Application Examples
March, 2015 3-59
the position.
Distance setting of PR incremental command
If EV1 is the DI signal for position compensation and P5-9 8 =0x0001, when this DI is triggered,
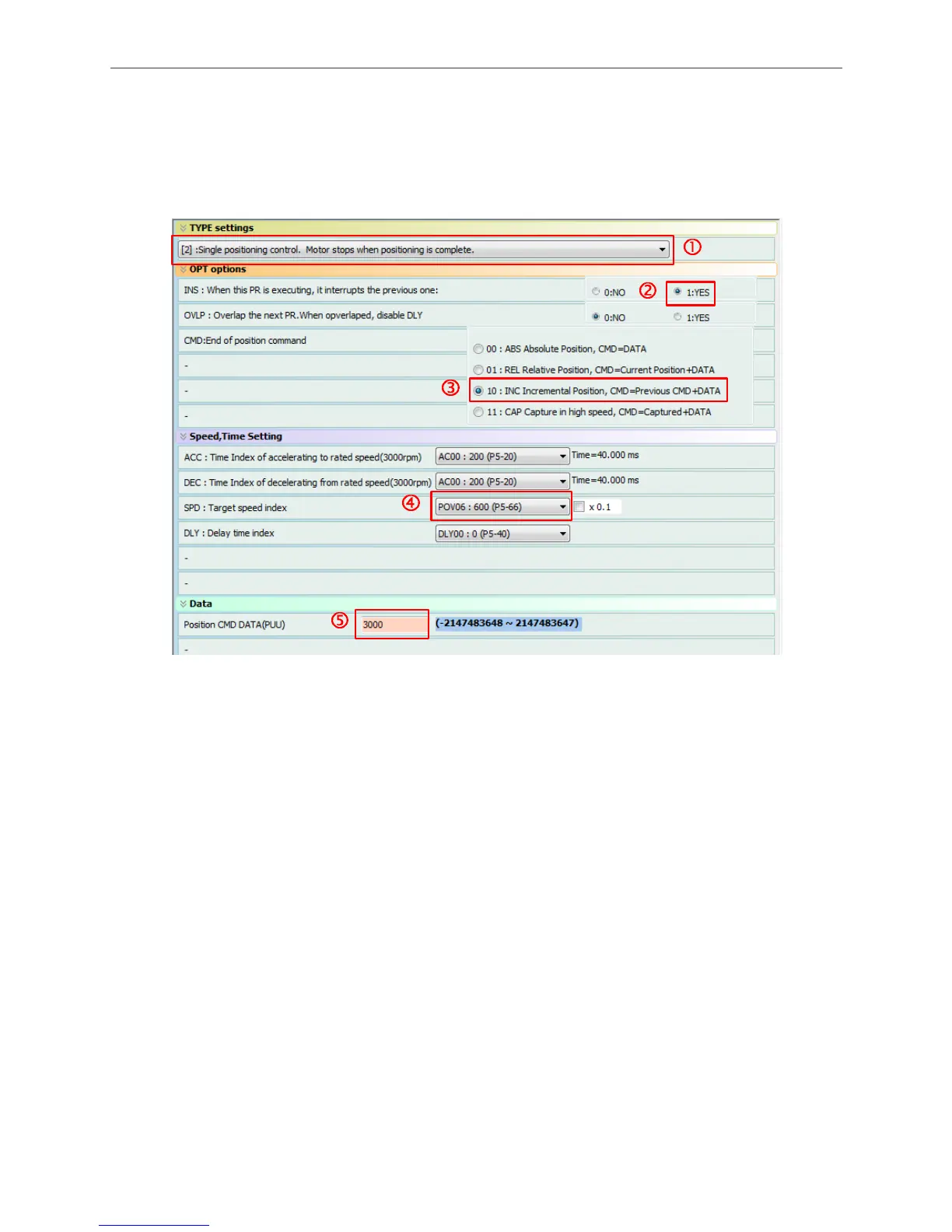
PR#51 will be executed. See the setting of PR#51 as below:
Figure 3.4.4 PR incremental command
In figure 3.4.4, mark 3, we choose 10: INC Incremental Position, CMD=Previous CMD+DATA
(incremental command). SPD: Target speed index (Target speed) is selected in mark 4. The
speed must be higher than synchronous speed. It can be adjusted in P5-66 by the host controller.
Mark 5 indicates the position that needs to be compensated. The position value can be positive
or negative. Positive value means the printing roller moves forward, while negative value means
the printing roller moves backward. This value also can be changed in P7-03 (PR#51) by the
host controller.
E-Cam curve setting
E-Cam curve and master axis are in linear relation. See figure 3.4.5 for the corresponding
relation between master axis and E-Cam.

 Loading...
Loading...




