ASDA Series Application Note Chapter 4 Application Techniques
March, 2015 4-13
Command from
Host Controller
(pulse)
Command from
Servo Drive
(PUU)
Actual Position of
Machine
(mm)
102
mm
208
mm
298
mm
404
mm
502
mm
1000
pulse
2000
pulse
3000
pulse
4000
pulse
5000
pulse
1000000
PUU
2000000
PUU
3000000
PUU
4000000
PUU
5000000
PUU
0
pulse
0
PUU
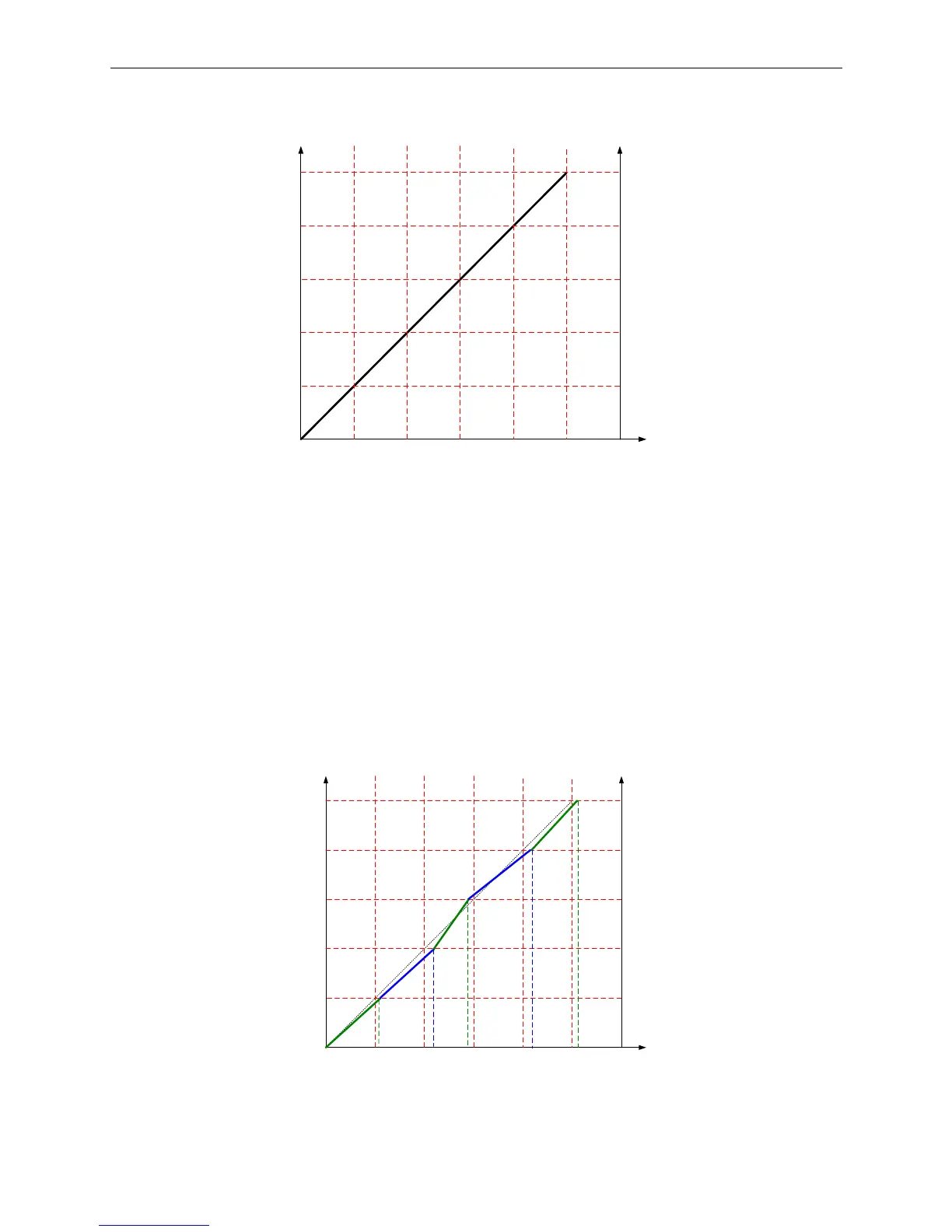
Figure 4.2.10 The Correlation when Tolerances Exist
4.2.3.3 Using E-Cam on ASDA-A2 for Compensation
Using E-Cam curve to compensate the command from the host controller is like creating a
tailor-made position curve for the lead screw. By doing so, the command resolution will not be
changed due to the pitch tolerances that causing the inconsistency between the host controller
and machine moving distance. The result after compensation is shown in Figure 4.2.11. With the
compensation, no matter it is on which division of the lead screw, the correlation between
command from host controller and moving distance of mechanism will be 1 pulse 0.1 mm.
Command from
the host (pulse)
Command from the Servo
(PUU)
Machine Position
(mm)
102
mm
208
mm
298
mm
404
mm
502
mm
1020
pulse
2080
pulse
2980
pulse
4040
pulse
5020
pulse
1000000
PUU
2000000
PUU
3000000
PUU
4000000
PUU
5000000
PUU
1000
pulse
2000
pulse
3000
pulse
4000
pulse
5000
pulse
0
pulse
0
PUU
Figure 4.2.11 The Compensation Curve

 Loading...
Loading...




