ASDA Series Application Note Chapter 4 Application Techniques
March, 2015 4-11
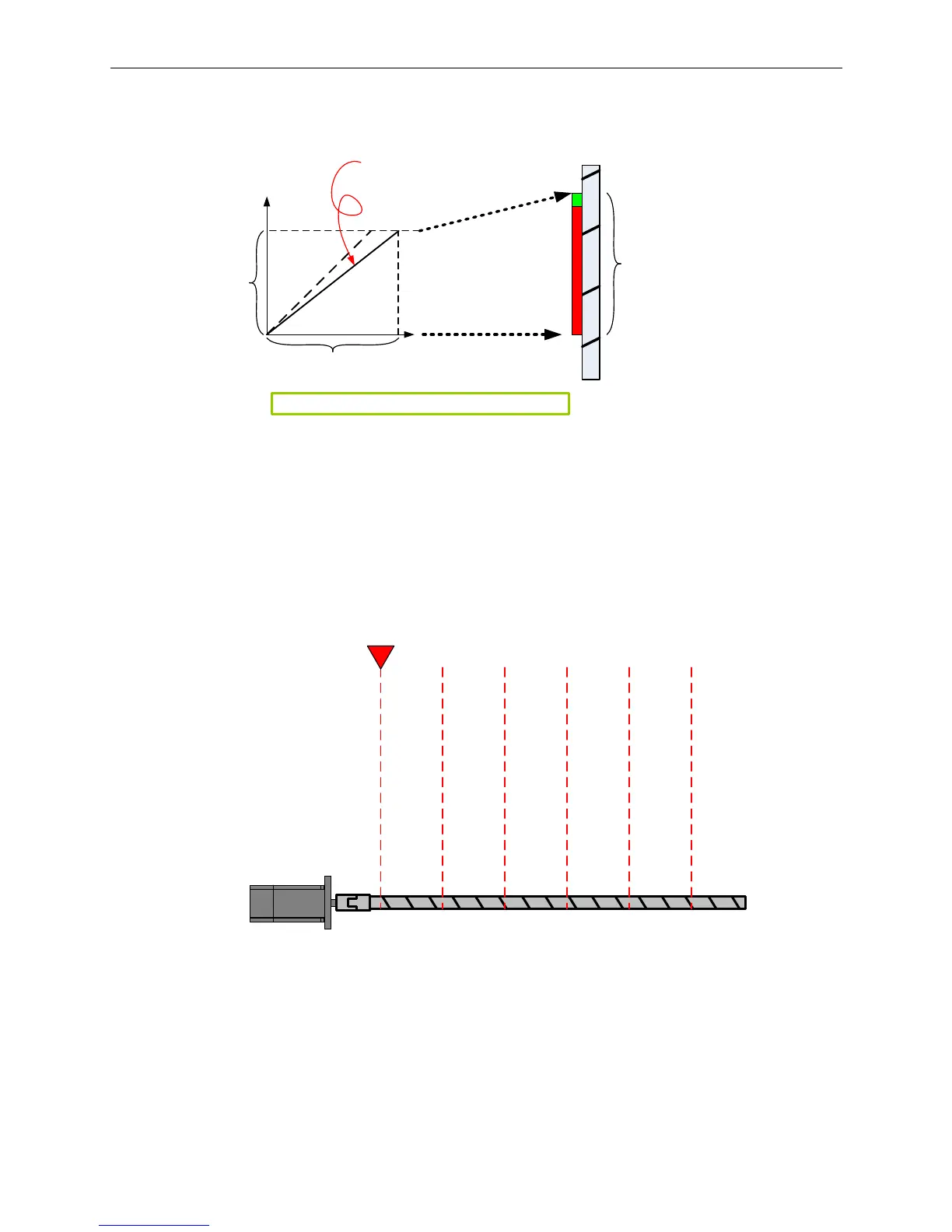
Command from host
controller (pulse)
Command from
servo drive
PUU
220 pulse
200
PUU
Change the conversion
capability of E-Cam curve
toward command from
host controller
Moving distance
of Machine
22 mm
1 pulse 0.9091 PUU 0.1 mm
Figure 4.2.6 The Correlation after Compensation by E-Cam Curve
4.2.3.2 Measurement and Measuring Result
If equally divide the lead of the lead screw by the host controller and use laser interferometer to
measure the actual moving distance and then record these data, the ideal condition is presented
below in Figure 4.2.7.
Let’s say command resolution is 0.1 mm / pulse.
Origin
Command from
Host Controller
1000
pulse
2000
pulse
3000
pulse
4000
pulse
5000
pulse
Machine Position
100
mm
200
mm
300
mm
400
mm
500
mm
1000000
PUU
2000000
PUU
3000000
PUU
4000000
PUU
5000000
PUU
Command from
Servo Drive
0
pulse
0
mm
0
PUU
Figure 4.2.7 Ideal Measurement Result when No Tolerance Exists

 Loading...
Loading...




