Chapter 4 Application Techniques ASDA Series Application Note
4-10 March, 2015
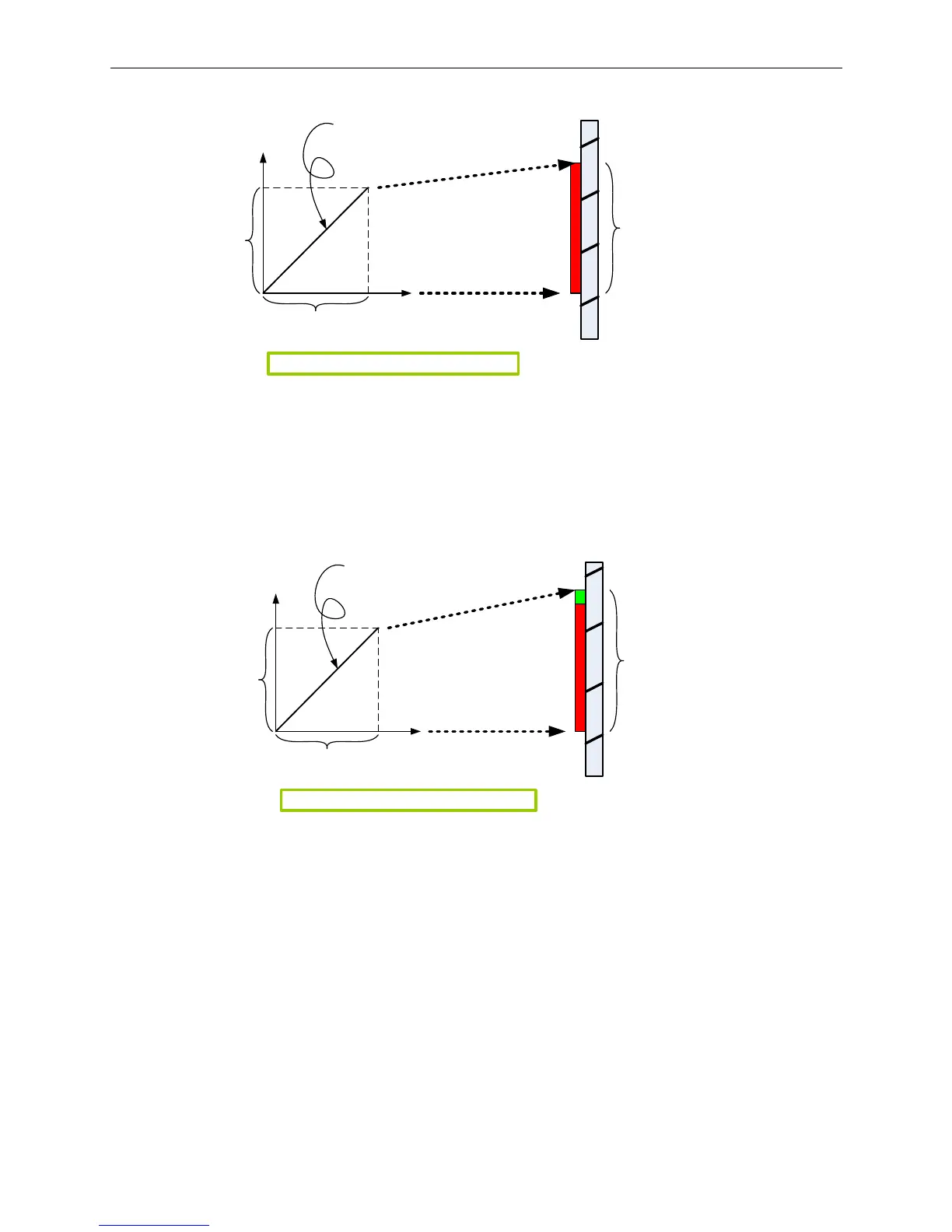
Command from host
controller (pulse)
Command
from the servo
PUU
200 pulse
200
PUU
Conversion capability of
E-Cam curve toward command
from host controller
Moving distance
of the mechanism
20 mm
1 pulse 1 PUU 0.1 mm
Figure 4.2.4 The Proper Correlation when No Tolerance Exists
When there is a tolerance on the lead screw, the actual moving distance is 22 mm. The
correlation will be: 1 pulse 1 PUU 0.11 mm. Regarding this motion, the command resolution
was 0.1 mm/pulse and now becomes 0.11 mm/pulse. This is caused by the tolerance between
pitches.
Command from host
controller (pulse)
Command from
Servo Drive
PUU
200 pulse
200
PUU
Conversion capability of E-Cam
curve toward command from host
controller
Moving distance
of mechanism
22 mm
1 pulse 1 PUU 0.11 mm
Figure 4.2.5 The Inconsistent Correlation when Tolerance Exists
In this case, an E-Cam curve can be used to modify the command resolution. If the new
correlation of E-Cam curve is 1 pulse 0.9091 PUU 0.1 mm, the correlation between host
command and the actual moving distance will be 1 pulse 0.1 mm. By applying the E-Cam
function, the command resolution of the host controller can be identical without being affected by
the tolerance. There is one thing worth noticing, the feedback pulse number from motor will differ
from the command value. For example, when the command is 220 pulse, the feedback pulse
from motor is 200 PUU and the actual moving distance of mechanism is 22 mm.

 Loading...
Loading...




