Introduction of PR Operation ASDA Series Application Note
1-34
March, 2015
1.3.3 Overlap of Commands
When using the overlap function, delay time is still effective in the system. To smoothly carry out
commands one after another, please set the delay time to 0 in the previous part when using the
overlap function. In this case, the next command will start operating when previous command is
in deceleration zone. By doing so, two motion commands can be smoothly connected and
vibration can thus be reduced. See figure 1.44. As delay time will influence the time sequence of
overlap, delay time is suggested to be set 0 in this application. Please note that when overlap is
enabled, previous command’s delay time count will begin from the moment that command starts.
Overlap is set in the previous command; that is to say, the deceleration zone of previous
command overlaps the acceleration zone of the next command.
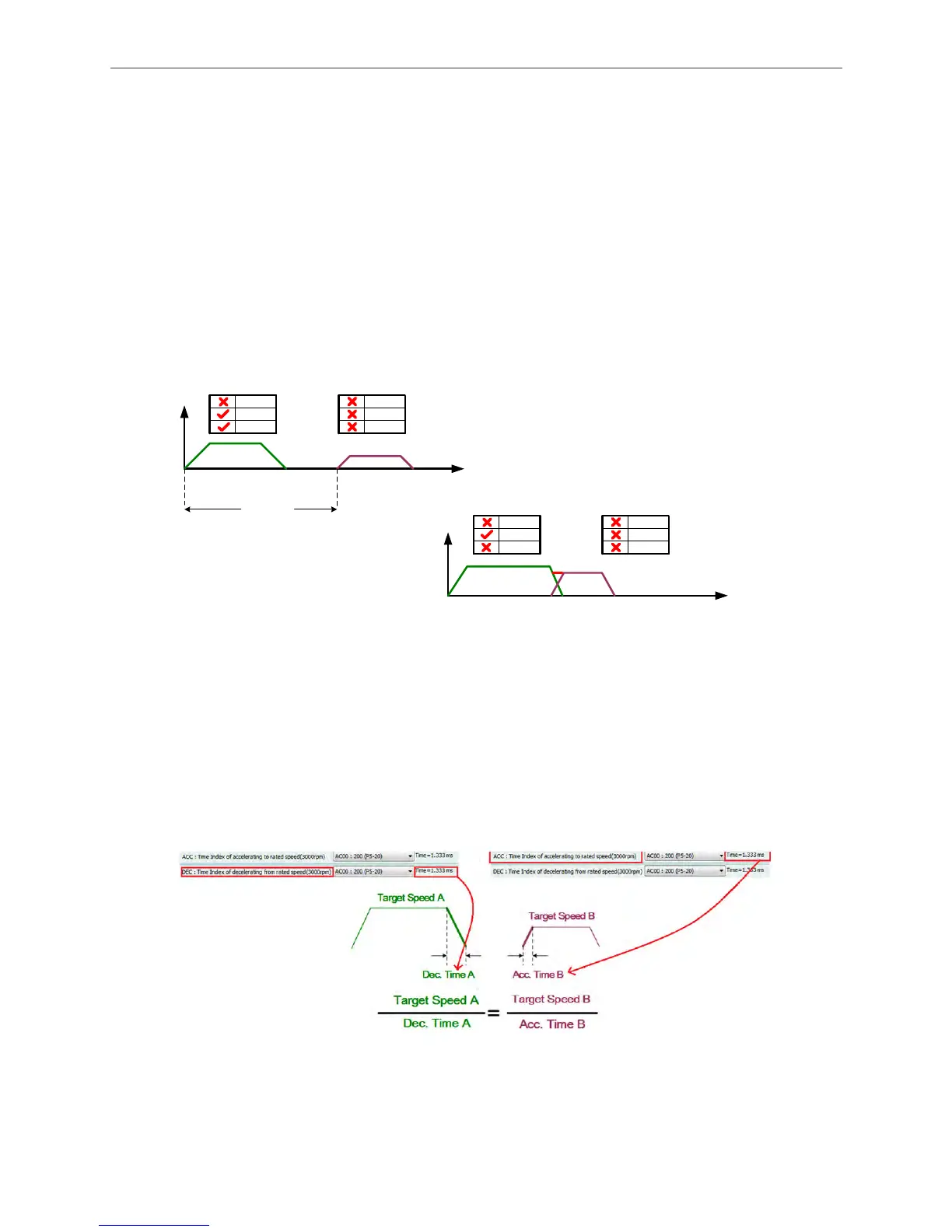
Figure 1.44 Overlap of Command
To have the overlap function perform well, users need to set up as follows:
Absolute value of deceleration curve slope from previous command = absolute value of
acceleration curve slope from next command
As shown in Figure 1.45, when previous command enters the deceleration zone, it will be able to
change to the speed specified by the next command smoothly, reducing the vibration caused by
speed changing.
Figure 1.45 Settings of Overlap Command
DLY 1
TIME
SPEED
INS
OVLP
DLY
INS
OVLP
DLY
P_Command
1 (Type 3)
P_Command 2
(Type 2)
TIME
SPEED
INS
OVLP
DLY
INS
OVLP
DLY
P_Command
1 (Type 3)
P_Command 2
(Type 2)

 Loading...
Loading...




