ASDA Series Application Note Application Examples
March, 2015 3-65
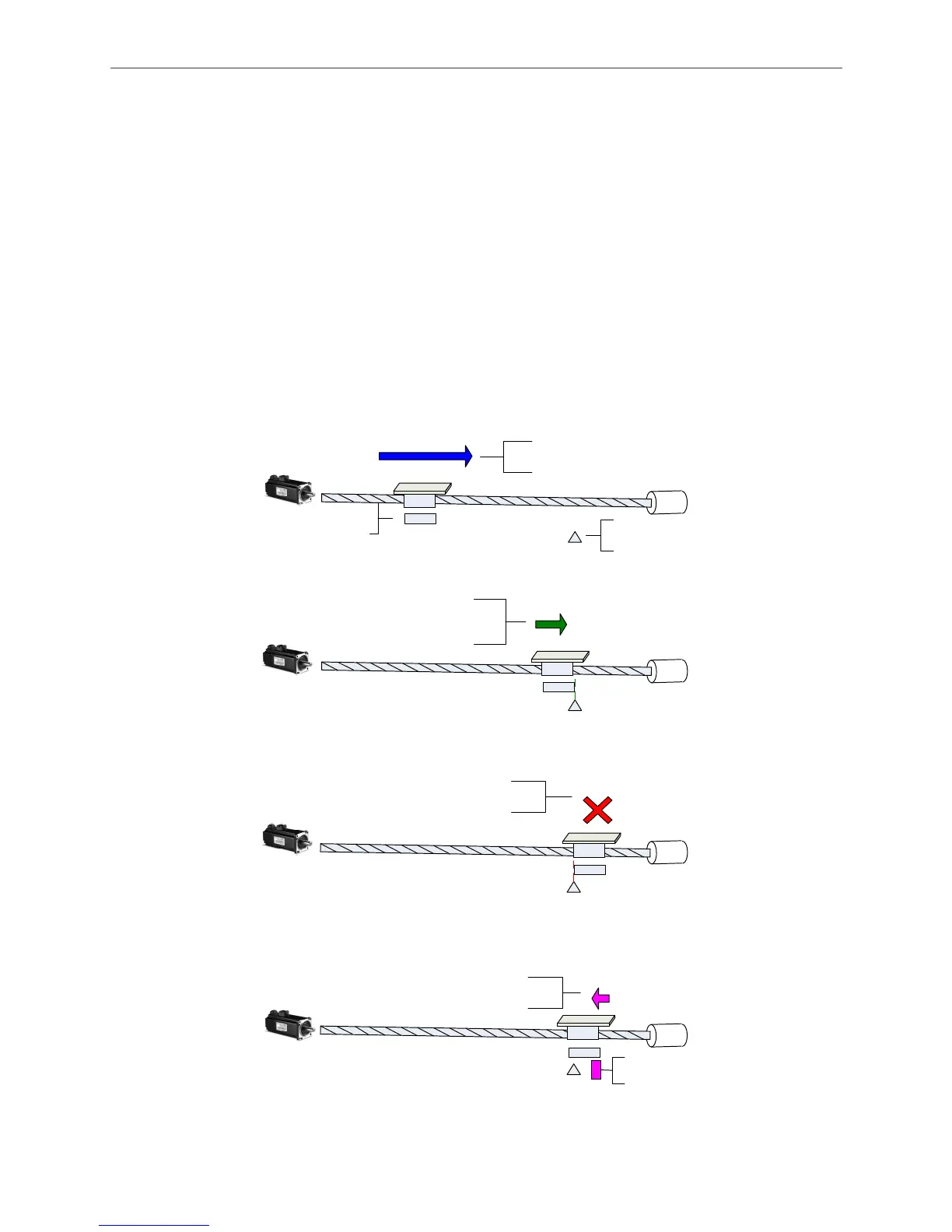
3.5.2.2 Positioning and Homing of Gantry
When gantry starts working, completed positioning and homing is required. Positioning is
completed by a position sensor installed on the side of each axis. This position sensor must be
correctly installed as this is the only part that enables the gantry to correct its parallel position. On
gantry’s moving platform, the sensing object with certain length is installed so that its length can
be used to change gantry’s moving speed. In this case, the positioning time can be shortened
and precision level is improved. Also, please adjust the length and running speed of the sensor
according to system requirements. Figure 3.5.2 shows the positioning control; after finishing
positioning, positioning point can be regarded as the homing origin (shown in figure (3) of Figure
3.5.2). Or, as shown in figure (4) of Figure 3.5.2, the nearest Z pulse can also be the homing
origin (either moving forward or backward to look for Z). The setting will be based on different
circumstances and users’ needs.
Position
sensor
Moving platform returns to
positioning point at high-speed
Z Pulse of the
servo drive
Moving platform encounters
position sensor and returns to the
positioning point at low-speed
Moving platform reaches the
positioning point and stops moving
Figure (1) Returning to
positioning point at high-speed
Figure (2) Encountering position
sensor and operating at low-speed
Figure (3) Reaching the
positioning point
Moving platform returns to the original
point (Z pulse) of the servo drive
Figure (4) Returning to search for Z pulse
and regarding it as the original point
Sensing
object
Figure 3.5.2 Returning to Positioning Point and Homing Origin

 Loading...
Loading...




