Introduction of PR Operation ASDA Series Application Note
1-22 March, 2015
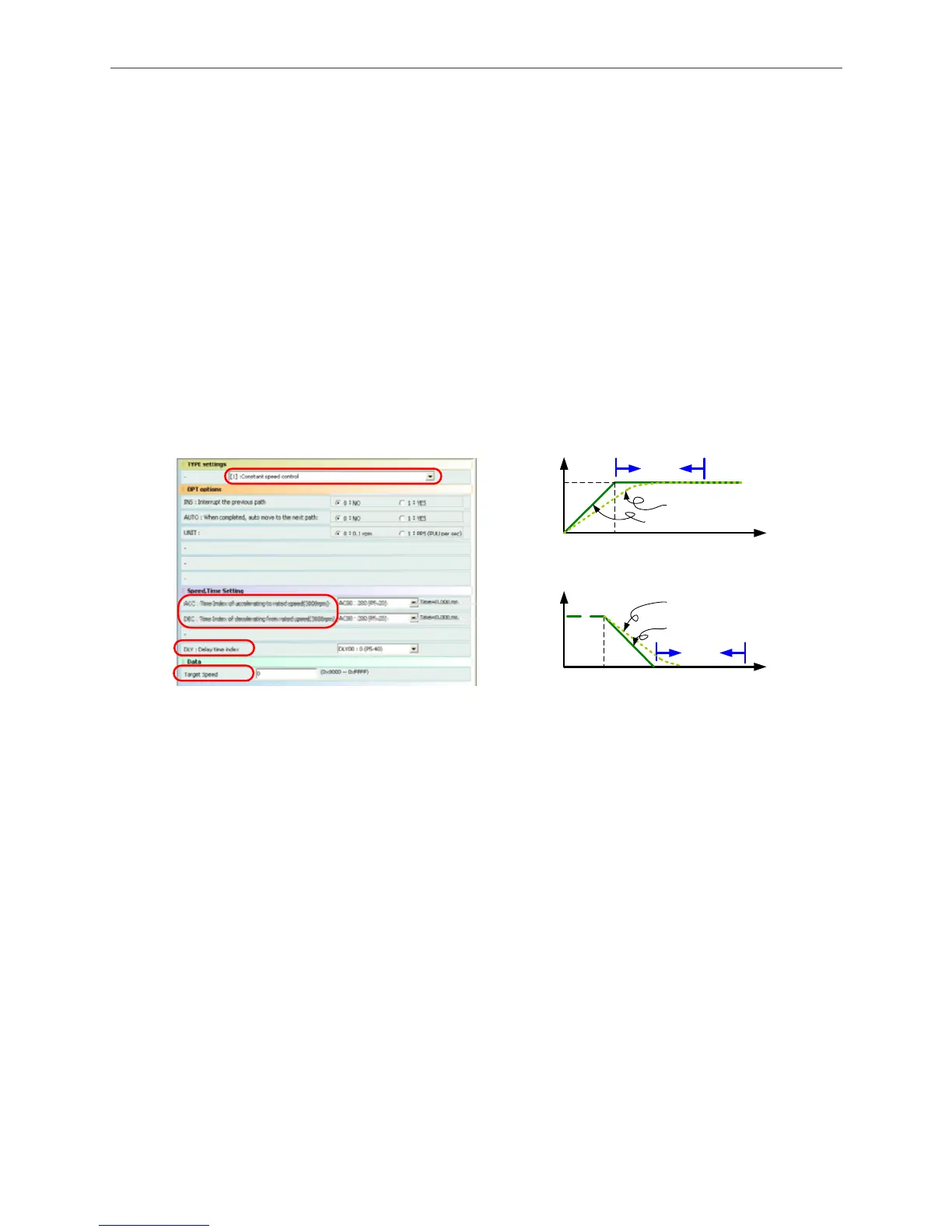
1.2.3 PR Speed Command
Users may use PR mode to configure the speed command, including acceleration/deceleration
time, target speed, and delay time. The speed command here refers to the speed command in
PR mode (P1-01=0), which is different from command in speed mode (P1-01=2)
Delay time refers to the interval after previous command is completed and before carrying out
the next command. The setting of delay time is defined by the servo drive, which means the
servo drive will not start counting the delay time until the motor has reached the target speed.
Delay time is not defined by motor’s feedback signal because the feedback setting time varies
with different system performance.
If the trigger setting of PR is defined as a speed command, motor will operate according to the
acceleration/deceleration setting until reaching the target speed. Then it keeps operating till
other command interrupts this PR command.
Target
Speed
Acc. Time
Time
Speed
Feedback Speed
Delay
Command
Speed
Target
Speed
Time
Dec. Time
Delay
Feedback Speed
Command
Figure 1.28 PR Speed Command

 Loading...
Loading...




