ASDA Series Application Note Introduction of PR Operation
March, 2015 1-29
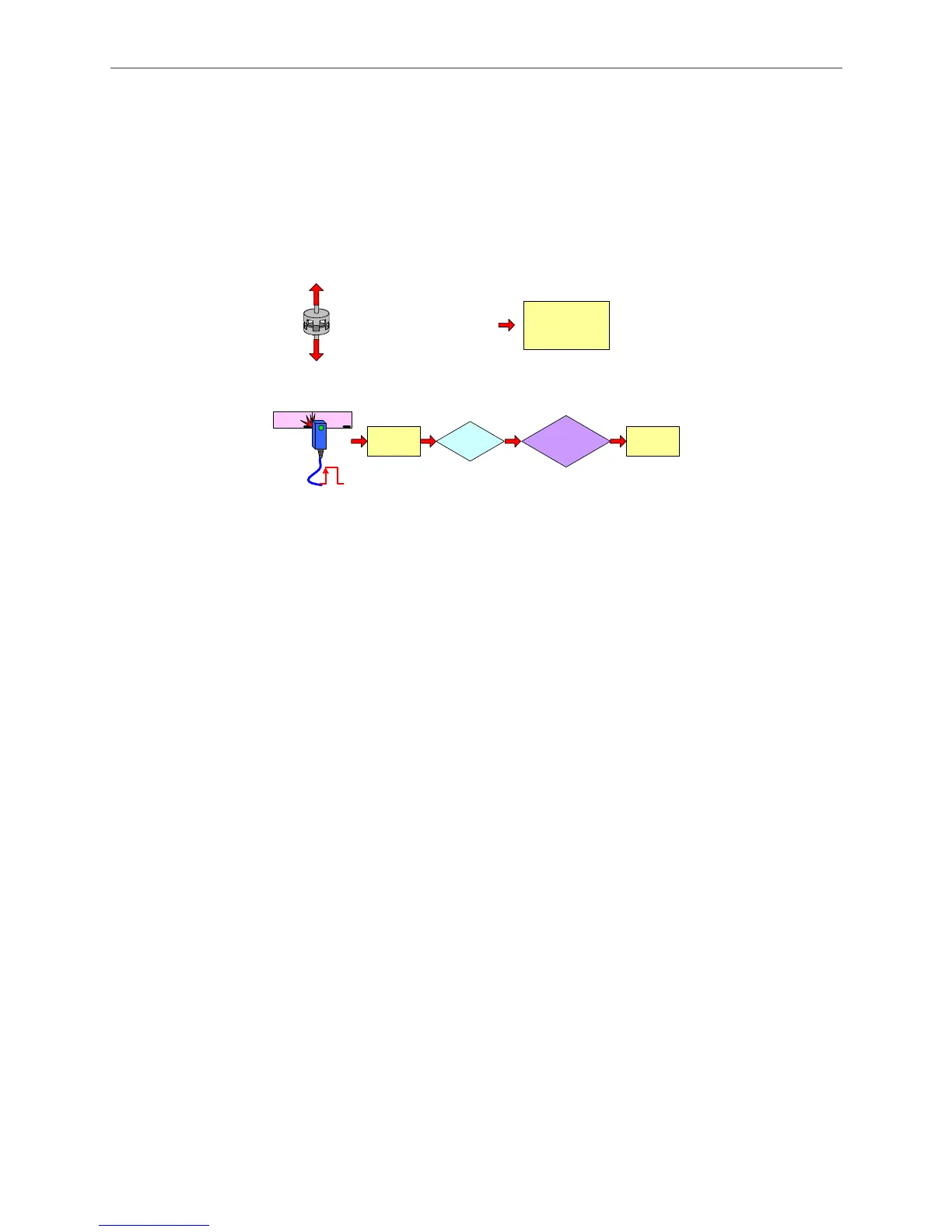
1.2.7.5 Others CAPTURE Completed / COMPARE Completed / E-CAM
Disengaged
If Bit 3 of P5-39 has been set, after Capture command (P5-38 = 0) is completed, the servo will
automatically call PR#45. If P5-88.BA has been set, when E-Cam is disengaged, the system will
regard the setting of P5-88.BA as PR path to be carried out and then automatically carry out this
PR.
Disengaging
conditions.
P5-88.U= 2,4, or 6
E-Cam disengaged
Call any PR set by
P5-88.BA.
DI7
P5-38 =
P5-38 - 1
P5-38= =0
Bit 3 of
P5-39.X
==1
PR#50
True True
Capture function
finished
Figure 1.37 Other Methods of Triggering PR
1.3 Motion Control
1.3.1 Monitoring Variables Related to PR
Regarding the operation of PR, four parameters are available to be used to observe commands
and feedback.
1. Cmd_O: Command operation, the motion command in operation which represents the
absolute coordinates of the current output command. It also includes the setting of
acceleration/deceleration and target speed when operating. (monitoring variable 001)
2. Cmd_E: command end, the target position; when command is issued to the servo, the
servo drive will figure out the final target position and promptly update Cmd_E (variable
064).
3. Fb_PUU: feedback PUU, motor’s current position (monitoring variable 000).
4. Err_PUU: error PUU, the deviation between command and the current position during
motor’s operation (monitoring variable 002).
Users can use PC scope of ASDA-Soft to observe PR’s monitoring variables. As shown in Figure
1.38, user can select feedback position or monitoring variable 000(00h) to monitor Fb_PUU,
select position command or monitoring variable 001(01h) to monitor Cmd_O, or select position
deviation or monitoring variable 002(02h) to see Err_PUU, and then observe Cmd_E by setting
up monitoring variable 064(40h). To observe monitoring variables in PC scope, check the item
ADR and enter 0x10000064 to see the change of Cmd_E. In regards to the input value,
0x100000 is a fixed value and the value 64 represents the 64-bit monitoring variable of target
position.

 Loading...
Loading...




