ASDA Series Application Note Application Examples
March, 2015 3-91
curve. Set P5-88.U to C could avoid the situation and have the same function as P5-88.U=4,
periodically disengage. Firmware version after V1.027 Sub.6 supports P5-88.U=C). It also can
satisfy the demand of one or more cutting skips through adjusting lead pulse (P5-92). See Figure
3.6.11.
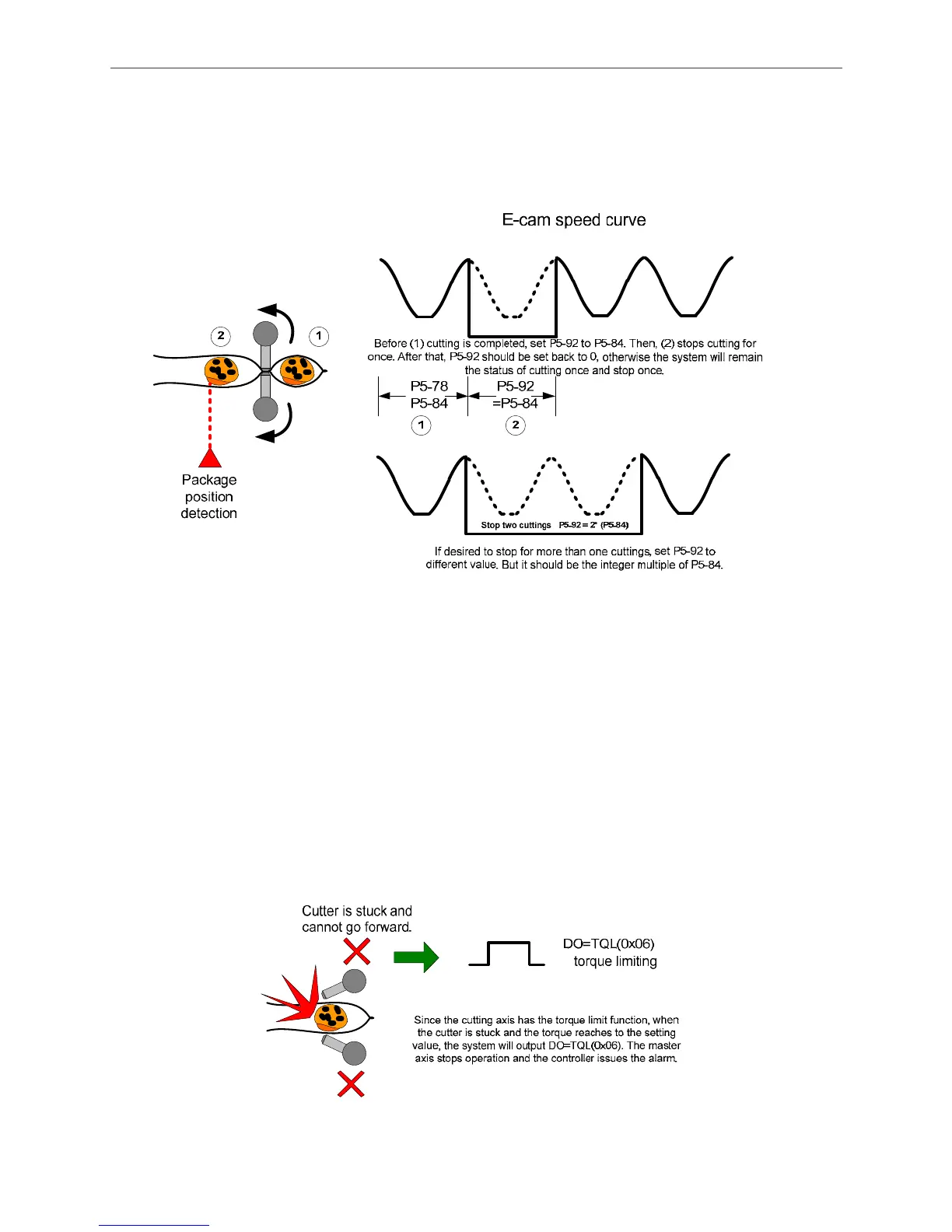
Figure 3.6.11 Controls cutting by periodical lead pulse
If the system cannot detect the wrong position of the package before entering the cutting area,
then users can apply torque limit function of the servo drive. It could limit the strength of cutter.
When the cutter reaches the setting value of torque limit, the DO signal will be issued to inform
the controller to stop delivering the film. And the alarm will be cleared by the operator. The
camshaft remains at engaging status at the moment and stops operation since the pulse stops
issuing. After removing the package, the master axis will keep delivering the film and the system
will continue the previous cycle. See Figure 3.6.12. Use torque limit as the mechanism protection
when the package is in wrong position, the system program should be taken into consideration. If
the system is in normal operation, and its toque value is close to the maximum value that servo
drive can output, then this way is inappropriate.
Figure 3.6.12 Use the torque limit to protect the mechanism

 Loading...
Loading...




