GEH-6641E
—————— Function Description ——————
108
Ch.1
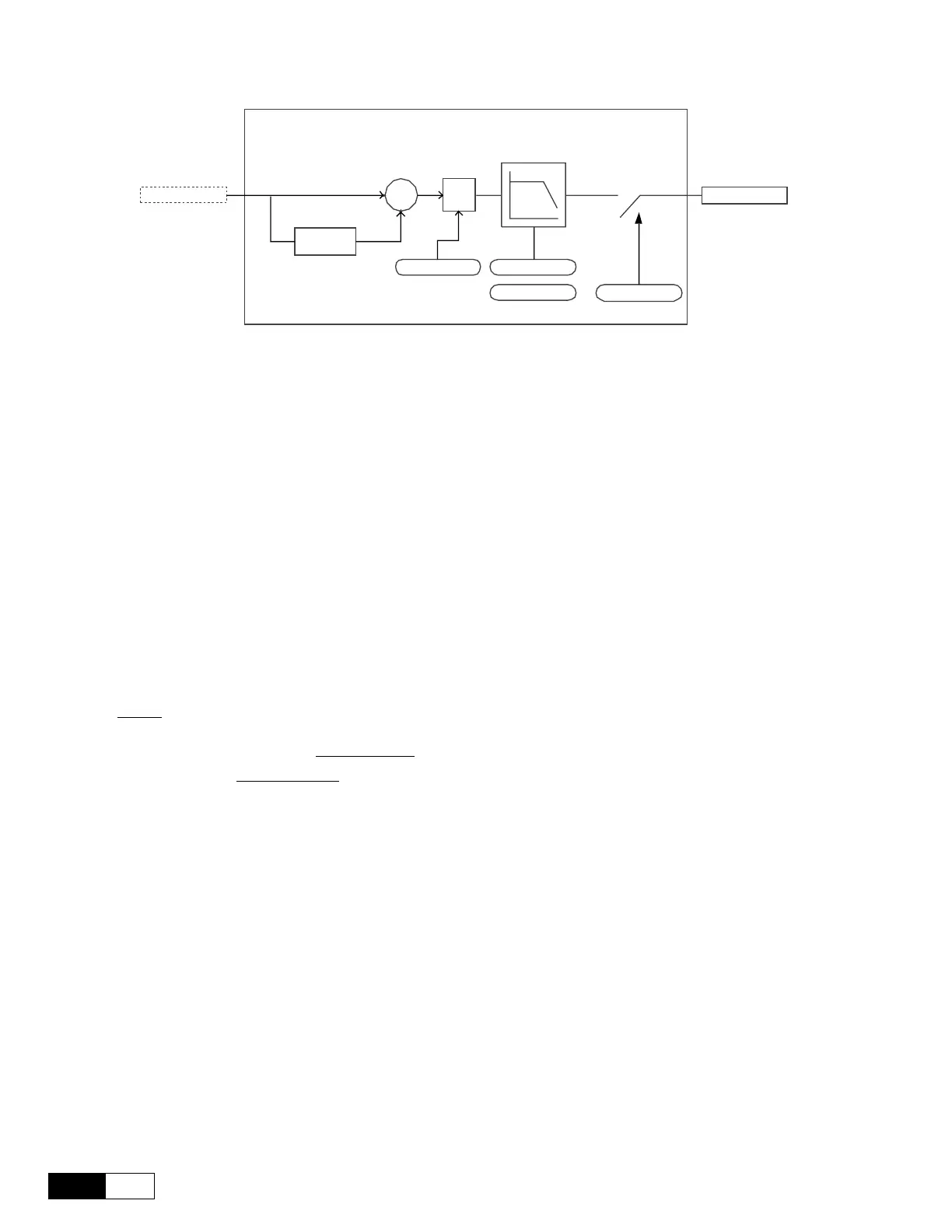
The Speed feedback derivative Block is shown in the figure below.
Speed Speed up out
Z-1
Spfbk der gain Sfbk der filter
Sfbk der base Sfbk der enable
X
_
+
IN
Speed fbk deriv cfg
Sfbk der enable Function enabling (enable or disable)
Spfbk der gain % Gain value
Sfbk der base Basic value of the % gain
Sfbk der filter Time constant of the Derivative component
1.8.10 Inertia and Friction Compensation Block (Inertia / Frict cp)
The Function is active only in a Sensorless and Field oriented mode.
The Block Function is to compensate the Inertia and the Frictions caused by the loads during the motor accelera-
tion or deceleration phase.
The function, by calculating the acceleration on the reference, is in a position to supply a Torque FeedForward.
Such condition allows a better regulation in the presence of loads with a high inertia.
The parameter calculation is performed during the self-tuning procedure of the speed loop.
As an alternative, the user can set the parameters by hands.
The
source, I/F cp en src allows to select the origin of the to enable or disable the function. Inertia src allows
to select the origin of the command signal moment of inertia; default this is connected to Int Inertia (stare
value) that it possible to set in the
configurations.
Morever in the Block
configurations it is possible with Int Friction to set the friction value and with Inertia cp
flt to state the time constant of the filter on the compensation.
The Block input is: · I/F cp en src
· Inertia src
Description:
SPEED CONFIG Inertia/Frict cp
I/F cp en src
I/F cp en src
Inertia src
I/F cp cfg
Int Inertia
Int Friction
Inertia cp flt
I/F cp mon
I/F cp mon
SPEED CONFIG SAVE PARAMETERS

 Loading...
Loading...




