7: BASIC INSTRUCTIONS
« FC4A MICROSMART USER’S MANUAL » 7-25
JMP (Jump) and JEND (Jump End)
The JMP (jump) instruction is usually used in combination with the JEND (jump end) instruction. At the end of a program,
the JMP instruction can also be used with the END instruction, instead of the JEND instruction.
These instructions are used to proceed through the portion of the program between the JMP and the JEND without pro-
cessing. This is similar to the MCS/MCR instructions, except that the portion of the program between the MCS and MCR
instruction is executed.
When the operation result immediately before the JMP instruction is on, the JMP is valid and the program is not executed.
When the operation result immediately before the JMP instruction is off, the JMP is invalid and the program is executed.
When the input condition to the JMP instruction is on and the JMP is executed, other instructions between the JMP and
JEND are executed as follows:
Input conditions cannot be set for the JEND instruction.
More than one JMP instruction can be used with one JEND instruction.
Corresponding JMP/JEND instructions cannot be nested within another pair of corresponding JMP/JEND instructions.
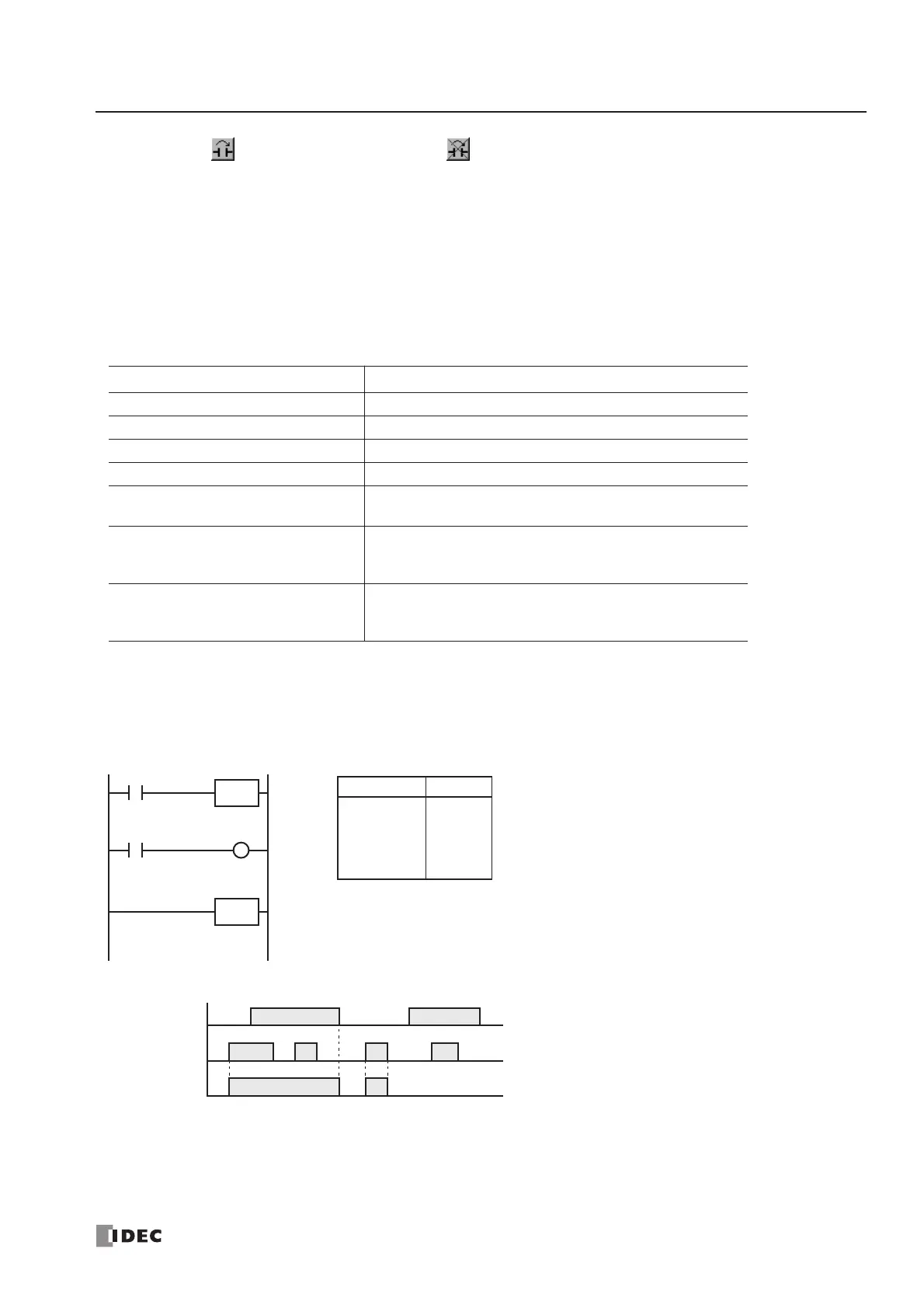
Instruction Status
SOTU Rising edges (ON pulses) are not detected.
SOTD Falling edges (OFF pulses) are not detected.
OUT and OUTN All are held in current status.
SET and RST All are held in current status.
TML, TIM, TMH, and TMS
Current values are held.
Timeout statuses are held.
CNT, CDP, and CUD
Current values are held.
Pulse inputs are turned off.
Countout statuses are held.
SFR and SFRN
Shift register bit statuses are held.
Pulse inputs are turned off.
The output from the last bit is held.
output status is held.
 Loading...
Loading...


