Function library
CAN (CAN management)
12
267
EDBCSXS064 EN 4.0
12.9 CAN (CAN management)
Function
By means of this function block,
ƒ a reset nodecan be carried out, e. g. in order to accept changes with regard to the
baud rate and addressing.
ƒ the instant of transmission of CAN2_Out and CAN3_Out can be influenced.
ƒ serves to monitor the MotionBus communication.
Note!
Even if the CAN function block has not been assigned to the control
configuration, a reset node can be carried out via C0358.
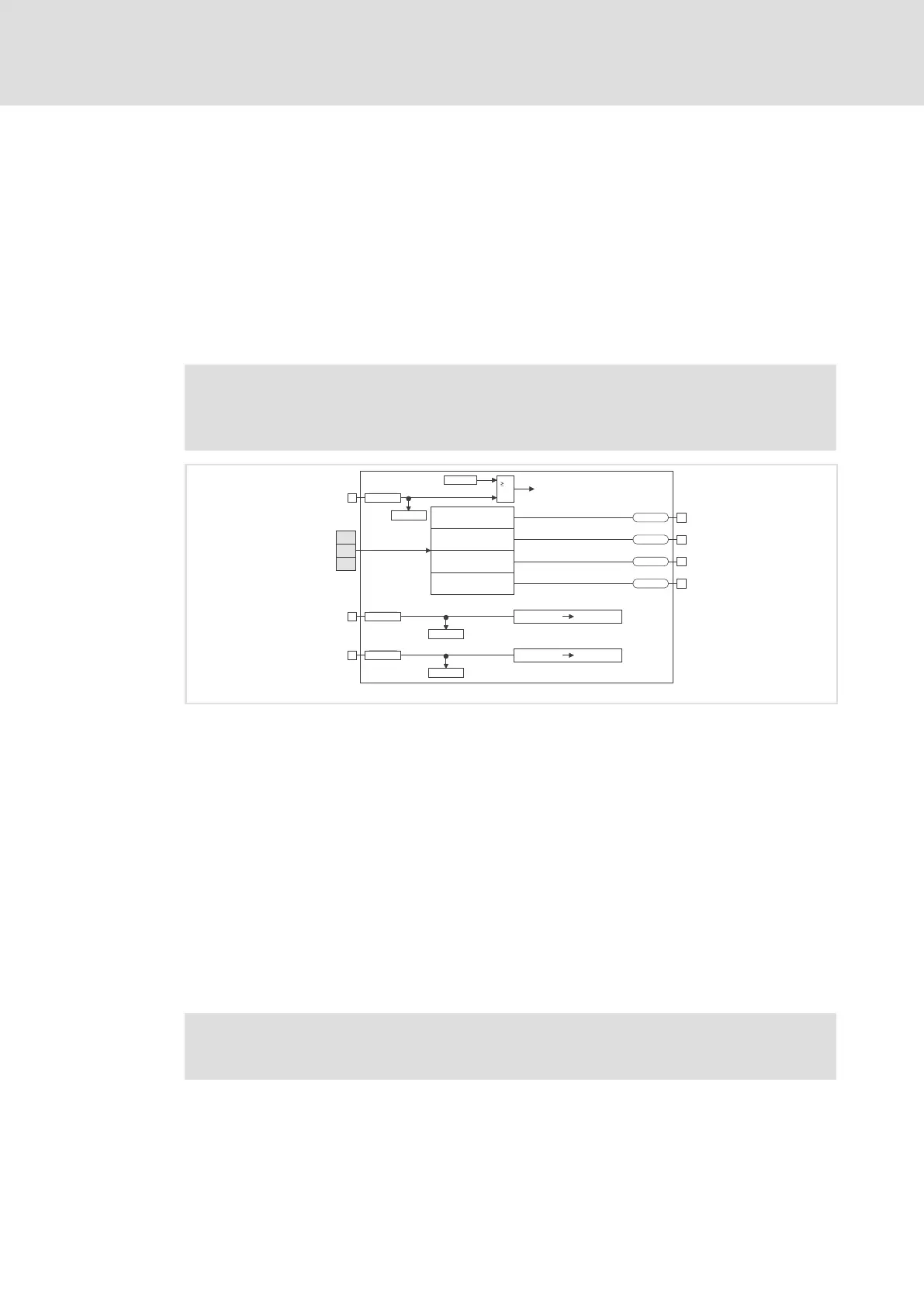
CAN
C0358
CAN2_OUT
CAN1_IN
Communication Error
CAN2_IN
Communication Error
CAN3_IN
Communication Error
CAN
Bus Off State
CAN_SYNC
CAN3_OUT CAN_SYNC
1
C6210/18
C6210/20
C6210/19
137
138
139
140
C6211/18
C6211/19
C6211/20
CAN_ResetNode
CAN-ResetNode
CAN-Ce2CommErrCanIn2
CAN-TxCan2Synchronized
CAN-Ce1CommErrCanIn1
CAN-Ce3CommErrCanIn3
CAN-Ce4BusOffState
CAN-TxCan3Synchronized
X4
CG
CH
CL
ECSXA210
Fig. 12−9 CAN function block (system bus management)
Tip!
More detailed information on the CAN bus can be found in the appendix of
this documentation ( 441).
"CAN−TxCan2Syncronized"/"CAN−TxCan3Syncronized" function
ƒ FALSE: data from CAN2_OUT/CAN3_OUT is sent at the end of the process image.
ƒ TRUE: data from CAN2_OUT/CAN3_OUT is sent after the CAN bus synchronisation.
– The identifiers for sync transmission and reception telegrams can be set via
C0367/C0368.
– The "Sync Tx time" can be set via C0369.
Note!
Detailed information concerning the CAN bus synchronisation: 179
 Loading...
Loading...