Examples of network variable bindings
CNT-SVP01C-EN 123
Use the Rover service tool to create bindings. (See the Rover Operation
and Programming guide, EMTX-SVX01C-EN.) Using the Rover service
tool, select the network variable from the Tracer MP581 and then select
the Tracer MP503. The Rover service tool shows you only the variables in
the Tracer MP503 of the SNVT that matches the variable you selected in
the Tracer MP581.
Table 16 shows the bindings needed.
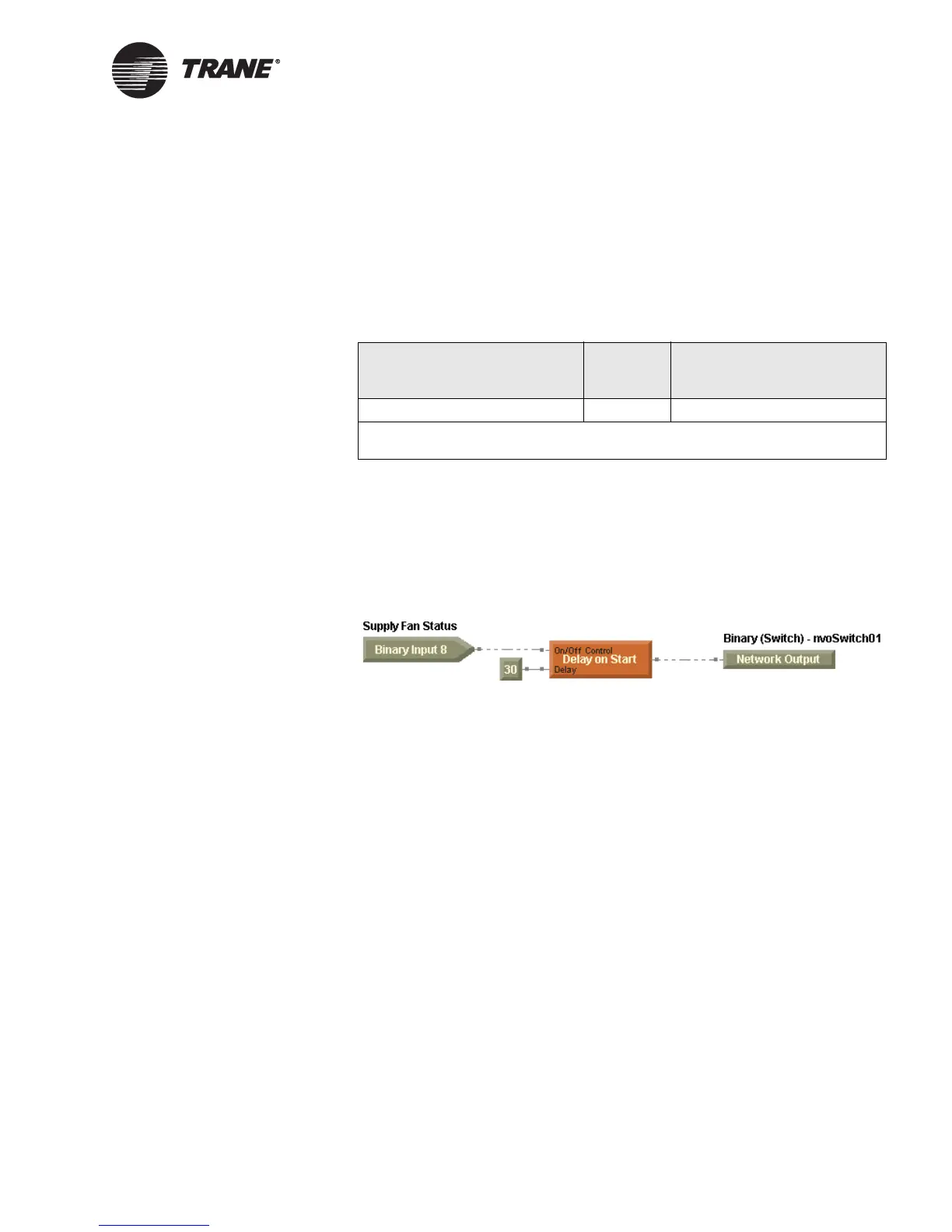
Custom programming in the Tracer MP581 controls nvoSwitch01. Write
a custom program to control nvoSwitch01 on when the AHU is on, and
has been on for 30 seconds, and off when the AHU is off. The network
binding passes the command to the binary output on the Tracer MP503.
See Figure 81 for a sample program written in the TGP editor.
Figure 81. Program for example 3
Example 4: Use a sensor reading on a Tracer MP503 to
control a pump VFD on a Tracer MP581
In this example, a Tracer MP581 controller is controlling the variable fre-
quency drive (VFD) of a chilled water pump. We want to use a differential
pressure sensor (4–20 mA output) to control the speed of this pump.
Unfortunately, the differential pressure sensor is located more than
1,000 ft away from the pump, so it cannot be wired directly to the univer-
sal input on the Tracer MP581. Install a Tracer MP503 I/O module to
read the differential pressure and then use network bindings to send the
pressure value to the Tracer MP581 controlling the chilled water pump
VFD.
Figure 82 on page 124 shows the Comm5 network for this example.
Table 16. Bindings for example 3
Network variable output on
the Tracer MP581
Network variable input on
the Tracer MP503
nvoSwitch01
1
binds to nviBOP1Request
1
The Tracer MP581 has 40 generic binary (SNVT_switch) network variable outputs
available for binding (nvoSwitch01 through nvoSwitch40).