Parameter Details
12
12.8 H: Terminal Function Selection
YASKAWA SIEPC71061753C GA500 Technical Manual 635
If the drive detects a fault for which you can set the stopping method, apply the appropriate Stopping Method.
Then push (RESET) on the keypad to turn the Run command OFF, or activate the fault reset terminal to reset
the fault.
Note:
The drive ignores the fault reset command when the Run command is active. Remove the Run command before trying to reset a fault.
■ 15: Fast Stop (N.O.)
Setting Value Function Description
15 Fast Stop (N.O.)
Sets the command to ramp to stop in the deceleration time set in C1-09 [Fast Stop Time] when the input terminal is ON while
the drive is operating.
WARNING! Incorrect Operation. Yaskawa recommends that you use H1-xx = 17 [Fast Stop (N.C.)]. If a circuit error occurs in
the MFDI, the drive cannot stop the output when the terminal set to H1-xx = 15 [Fast Stop (N.O.)] turns ON.
If you cancel the fast stop input, the drive will not restart the motor until you meet these conditions:
• Fully stop the motor
• Cancel the Run command
• Cancel the fast stop command
Note:
• To use the N.C. switch to input the fast stop command, set H1-xx = 17 [Fast Stop (N.C.)].
• Refer to C1-09: Fast Stop Time on page 549 for more information.
• Set C1-09 [Fast Stop Time] to a correct deceleration time. If the deceleration time is too short, it can cause an overvoltage fault, which
will not stop the motor from coasting.
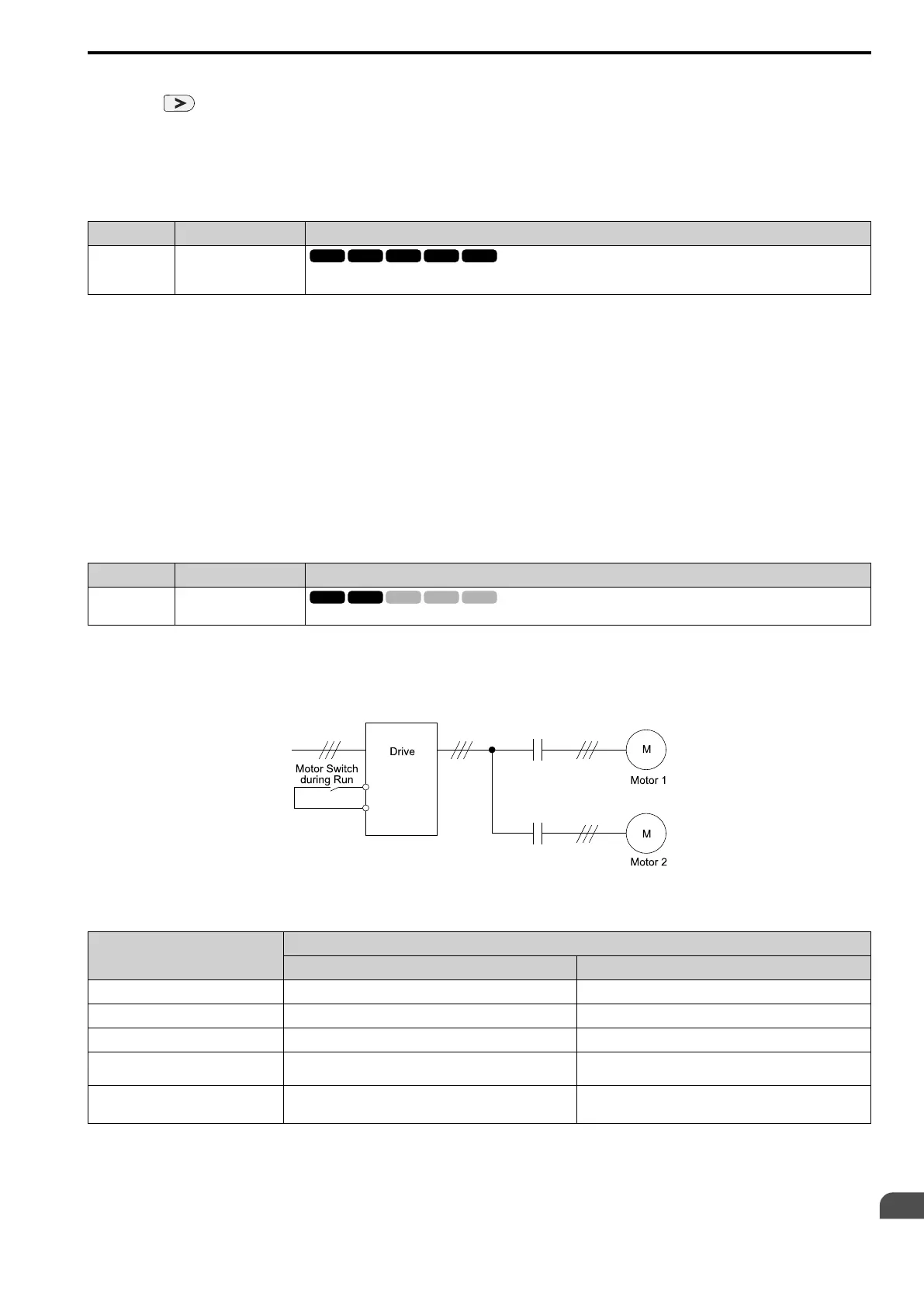
■ 16: Motor 2 Selection
Setting Value Function Description
16 Motor 2 Selection
Sets the command for the drive to operate motor 1 or motor 2. Stop the motors before switching.
You can use an external input to switch operation between two induction motors. The drive will save the control
methods, V/f patterns, and motor parameters for the two motors.
ON : Operate motor 2
OFF : Operate motor 1
When you select motor 2, the drive will switch to motor 2 parameters.
Table 12.57 Parameters that Switch between Motor 1 and Motor 2
Parameter
Motor 2 Selection
OFF (Motor 1) ON (Motor 2)
C1-xx [Accel & Decel Time] C1-01 to C1-04 C1-05 to C1-08
C3-xx [Slip Compensation] C3-01 to C3-04 C3-21 to C3-24
C4-xx [Torque Compensation] C4-01 C4-07
C5-xx [Automatic Speed Regulator
(ASR)]
C5-01 to C5-08, C5-12 -
E1-xx, E3-xx [V/f Patterns]
E2-xx, E4-xx [Motor Parameters]
E1-xx, E2-xx E3-xx, E4-xx
Note:
• When you use 2 motors, the drive applies the protective function set in L1-01 [Motor Overload Protection Select] to motor 1 and motor
2.
• You cannot switch between motors 1 and 2 during run. If you try to switch motors when they are running, it will cause a rUn error.
• You must wait 200 ms minimum to input a Run command.

 Loading...
Loading...







