Parameter Details
12
12.9 L: Protection Functions
YASKAWA SIEPC71061753C GA500 Technical Manual 721
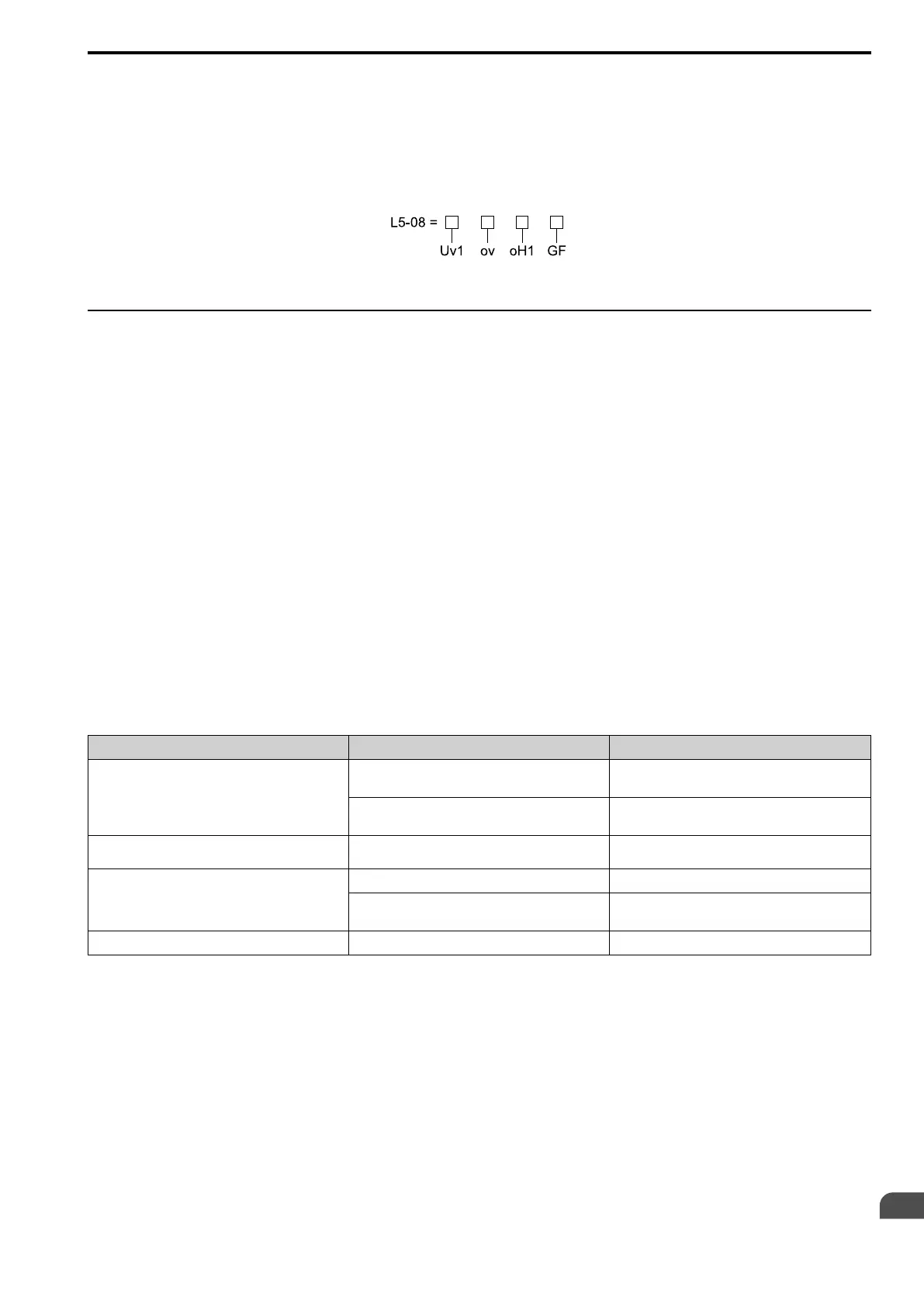
1010 : Enabled (Uv1/–/oH1/–)
1011 : Enabled (Uv1/–/oH1/GF)
1100 : Enabled (Uv1/ov/—/–)
1101 : Enabled (Uv1/ov/—/GF)
1110 : Enabled (Uv1/ov/oH1/–)
1111 : Enabled (Uv1/ov/oH1/GF)
Figure 12.127 Setting Digits and Fault Code
◆ L6: Torque Detection
The overtorque/undertorque detection function prevents damage to machinery and loads.
Overtorque is when there is too much load on the machine. If the motor current or output torque is at the
overtorque detection level for the overtorque detection time, the drive will output an alarm and turn off the output.
Undertorque is when a load suddenly decreases. When the motor current or output torque is at the undertorque
detection level for the undertorque detection time, the drive will output an alarm and turn off the output.
You can use the undertorque detection function to detect these conditions, for example:
• Machine belt cuts
• Unusual operation of the electromagnetic contactor on the drive output side
• Clogged output side air filters in fans and blowers
• Damage to blade tips and broken string
Note:
If there is oC [Overcurrent] or oL1 [Motor Overload], the drive can stop during overtorque conditions. Use torque detection to identify
overload conditions before the drive detects oC or oL1 and stops. Use this function to detect issues that occur in the application.
■ Parameter Settings
You can individually set the two overtorque/undertorque detection functions with the drive. Use the information in
Table 12.70 to set the parameters.
Table 12.70 Overtorque/Undertorque Detection Parameters
Configuration Parameter Overtorque/Undertorque Detection 1 Overtorque/Undertorque Detection 2
MFDO Function Select
• Terminal MA-MC
• Terminal P1-C1
• Terminal P2-C2
H2-01, H2-02, and H2-03 = B
N.O.: Activated when detected
H2-01, H2-02, and H2-03 = 18
N.O.: Activated when detected
H2-01, H2-02, and H2-03 = 17
N.C.: Disactivated when detected
H2-01, H2-02, and H2-03 = 19
N.C.: Disactivated when detected
Detection conditions and selection of operation after
detection
L6-01 L6-04
Detection Level L6-02 L6-05
Analog Input Terminal
*1
H3-xx = 7
-
Detection Time L6-03 L6-06
*1 You can also use an analog input terminal to supply the torque detection level. To enable this function, set H3-xx = 7 [MFAI Function
Selection = Overtorque/Undertorque DetectLvl]. If both L6-02 and H3-xx = 7 are set, the analog input has priority and the setting of
L6-02 is disabled.
You cannot use Overtorque/Undertorque Detection 2 to set the detection level for the analog input terminals.
Note:
In V/f Control, the drive uses the current level (100% of the drive rated output current) to detect overtorque/undertorque. In vector
control, the drive uses the motor torque (100% of the motor rated torque)to detect overtorque/undertorque. When you enable the
mechanical weakening detection function, the overtorque/undertorque detection level for all control modes is the current level (100% of
the drive rated output current).

 Loading...
Loading...







