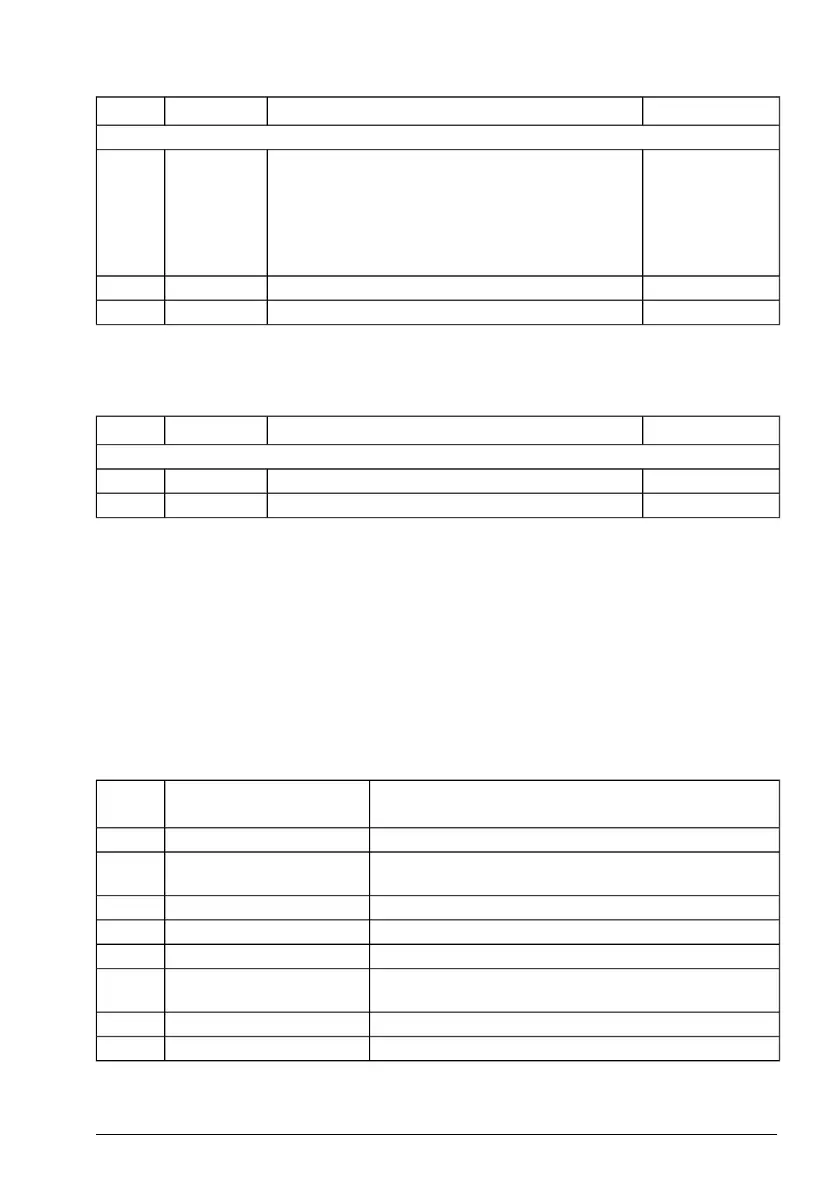
Def/FbEq16/32DescriptionName/ValueNo.
91 Enc adapter settings
DoneValidates any changed encoder interface module
parameters. This is needed for any parameter
changes in groups 90…92 to take effect. After refresh-
ing, the value reverts automatically to Done.
Enc par re-
fresh
91.10
Note: The parameter cannot be changed while the
drive is running.
0Refreshing done.Done
1Refreshing.Configure
Encoder configuration
This parameter group selects the settings for the encoder
Def/FbEq16/32DescriptionName/ValueNo.
92 Encoder 1 configuration
32Defines the TTL or HTL pulse number per revolution.Pulses/rev92.10
1=10…65535
Diagnostics
With parameter 90.45 Motor feedback fault, you can select how the drive reacts when
it detects that the encoder signal is lost.
•
90.45 = 0 (Fault) – The drive generates a fault (7301 Motor speed feedback), and
the motor coasts to a stop.
•
90.45 = 1 (Warning) – The drive generates a warning (A7B0 Motor speed feedback)
and continues operation using estimated feedbacks.
If the drive generates this fault or warning:
CauseFault/WarningCode
(hex)
No motor speed feedback is receivedMotor speed feedback7301
Drift detected.4
Check for slippage between encoder and motor.
Incorrect motor feedback configuration3FC
Incorrect motor speed3FD
No motor speed feedback is receivedMotor speed feedbackA7B0
Encoder drift detected.4
Check for slippage between encoder and motor.
Incorrect motor feedback configuration3FC
Incorrect motor speed3FD
BTAC-02 pulse encoder interface module 217
 Loading...
Loading...











