8400 StateLine C | Reference manual
Motor control (MCTRL)
V/f characteristic control - energy-saving (VFCplusEco)
152 L Firmware ≤ 11.00 - DMS 8.0 EN - 10/2011
5.5.5 Remedies for undesired drive behaviour
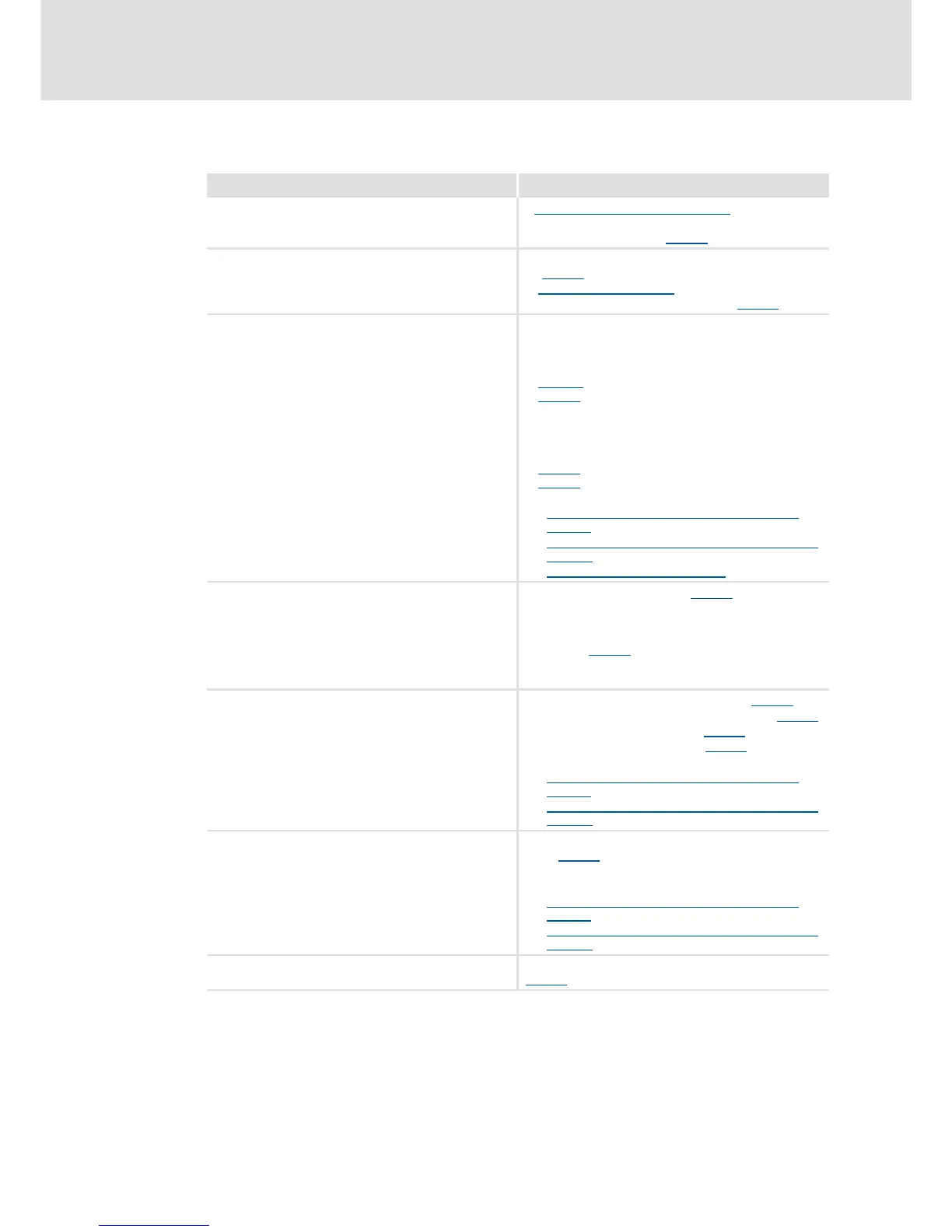
Drive behaviour Remedy
Inadequate smooth running at low speeds, especially in
the case of operation with a long motor cable
Automatic motor data identification
( 112)
Reduce the influence of the Eco function by increasing
the minimum voltage V/f (C00977
).
Problems in case of high starting duty (great mass
inertia)
1.Set motor control VFCplus with linear characteristic
(C00006
=6).
2.Adapting the Vmin boost
. ( 134)
3.Again set motor control VFCplusEco (C00006
=11).
Drive does not follow the speed setpoint The current controller intervenes in the set field
frequency to limit the controller output current to the
maximum current (C0022, C0023). Therefore:
• Prolong acceleration/deceleration times:
C00012:
Accel. time - main setpoint
C00013
: Decel. time - main setpoint
• Consider a sufficient magnetising time of the motor.
Depending on the motor power, the magnetising
time amounts to 0.1 ... 0.2 s.
• Increase the maximally permissible current:
C00022
: Imax in motor mode
C00023
: Imax in generator mode
• Make adaptations for the Eco function:
–Improving the behaviour at high dynamic load
changes. ( 150)
–Adapting the slope limitation for lowering the Eco
function. ( 151)
–Optimising the cos/phi controller
. ( 151)
Insufficient speed constancy at high load (setpoint and
motor speed are not proportional anymore)
• Increase slip compensation (C00021
).
Important: Unstable drive due to overcompensation!
• With cyclic load impulses (e. g. centrifugal pump), a
smooth motor characteristic is achieved by smaller
values in C00021
(possibly negative values).
Note: The slip compensation is only active for operation
without speed feedback.
"Clamp operation active" error message (OC11):
Controller cannot follow dynamic processes, i.e. too
short acceleration/deceleration times in terms of load
ratios.
• Increase the gain of the I
max
controller (C00073)
• Reduce the reset time of the I
max
controller (C00074)
• Prolong the acceleration time (C00012
)
• Prolong the deceleration time (C00013
)
• Make adaptations for the Eco function:
–Improving the behaviour at high dynamic load
changes. ( 150)
–Adapting the slope limitation for lowering the Eco
function. ( 151)
Motor stalling in the field weakening range
(adaptation especially required for small machines)
• If motor power < inverter power:
Set C00022
to I
max
= 2 I
rated motor
• Reduce dynamic performance of setpoint generation
• Make adaptations for the Eco function:
–Improving the behaviour at high dynamic load
changes. ( 150)
–Adapting the slope limitation for lowering the Eco
function. ( 151)
Speed variations in no-load operation for speeds > 1/3
rated speed.
Minimise speed oscillations with oscillation damping
(C00234
).

 Loading...
Loading...