7 - 55
7 Parameter Details
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
7-7 Special Parameters
7
7-7 Special Parameters
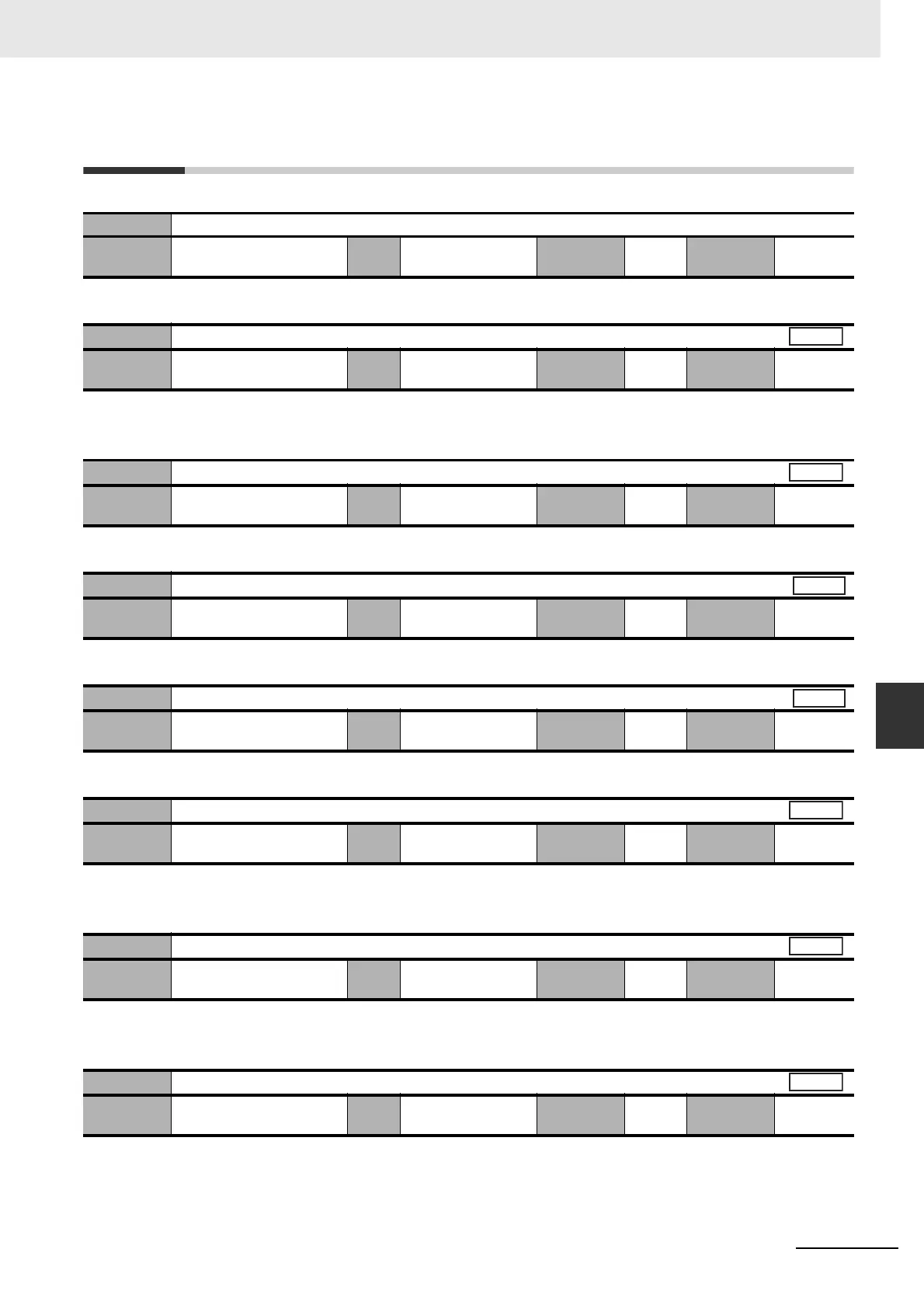
• Do not set.
• Set the detection level for Excessive Speed Error (Alarm No. 24.1).
• When set to 0, the detection of Excessive Speed Error is disabled.
• Set the command speed for trial JOG operation (speed control).
• Set effective time of Gain 3 for 3-step gain switching.
• Set Gain 3 as a multiple of Gain 1.
• Set the offset torque to add to torque commands.
• The unit is a percentage (%) of the rated torque.
• Set the value to be added to torque commands for operation in the forward direction.
• The unit is a percentage (%) of the rated torque.
• Set the value to add to torque commands for operation in the reverse direction.
• The unit is a percentage (%) of the rated torque.
Pn600 Reserved
Setting
range
0 Unit – Default
setting
0
Cycle the
power supply
–
Pn602
Excessive Speed Error Setting
Setting
range
0 to 20,000 Unit r/min Default
setting
0
Cycle the
power supply
–
Pn604
Jog Speed
Setting
range
0 to 500 Unit r/min Default
setting
300
Cycle the
power supply
–
Pn605
Gain 3 Effective Time
Setting
range
0 to 10,000 Unit 0.1 ms Default
setting
0
Cycle the
power supply
–
Pn606
Gain 3 Ratio Setting
Setting
range
50 to 1,000 Unit % Default
setting
100
Cycle the
power supply
–
Pn607
Torque Command Value Offset
Setting
range
–100 to 100 Unit % Default
setting
0
Cycle the
power supply
–
Pn608
Forward Direction Torque Offset
Setting
range
–100 to 100 Unit % Default
setting
0
Cycle the
power supply
–
Pn609
Reverse Direction Torque Offset
Setting
range
–100 to 100 Unit % Default
setting
0
Cycle the
power supply
–
All
All
Position
Position
All
All
All

 Loading...
Loading...





