LD Cart Transporter User's Guide, 14766-000 Rev B
Page 131 of 190
Chapter 8: Operation
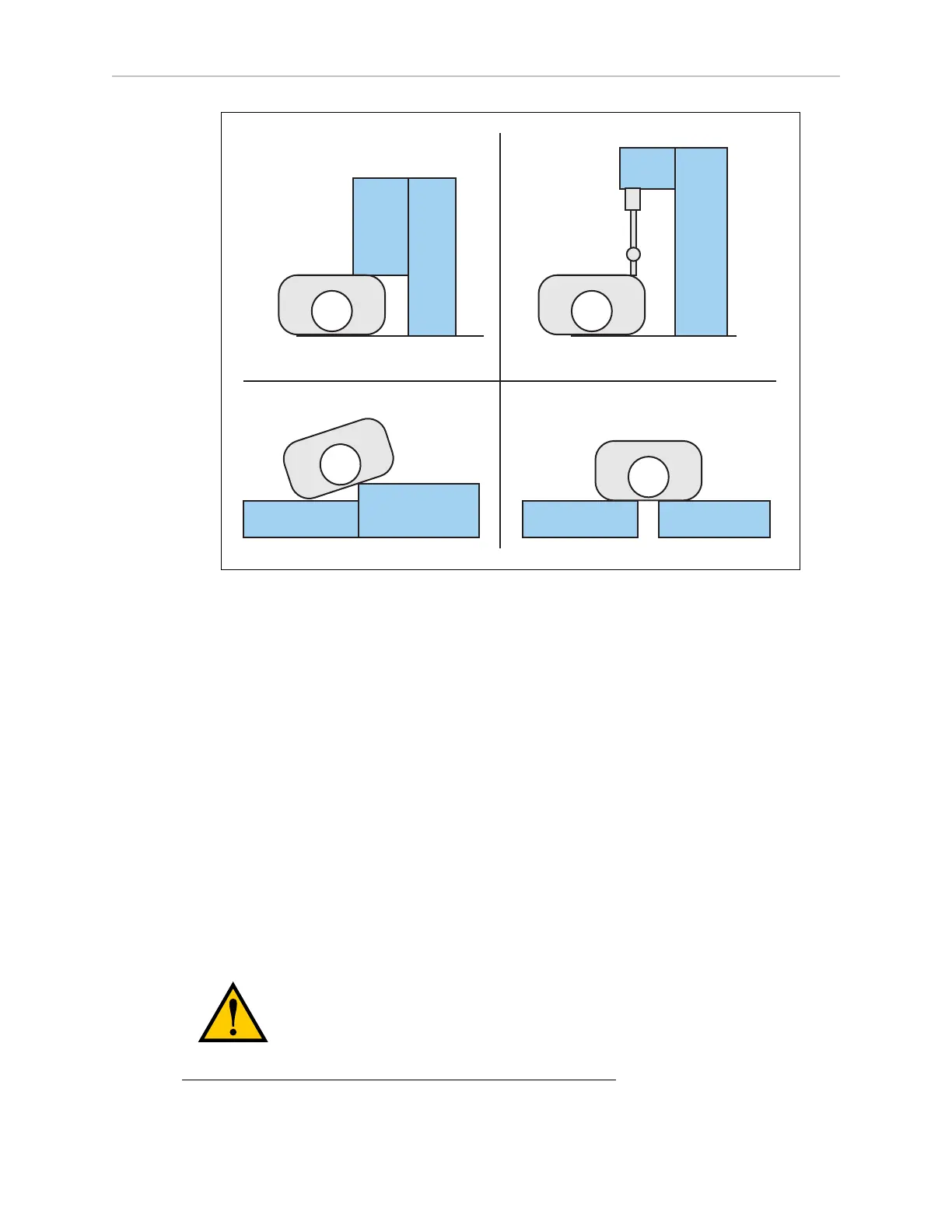
Driven off Ledge Driven Over Excessive Gap
Platform Stuck Under Overhang Robot Stuck Under Overhang
Figure 8-1. Robot Getting Stuck Examples
8.2 Typical Operation
During normal startup, your platform powers all its onboard systems
1
and runs its onboard
software automatically to provide an application-ready AIV. If it has been given a map of its
workspace and knows where it is within that environment (localized), your AIV is ready to
perform on startup and will operate autonomously, without human intervention.
Paths are not pre-programmed, but instead are generated dynamically onboard the platform.
Paths are updated many times per second to maintain a smooth trajectory and to account for
any obstacles that are detected by the onboard sensors. Navigational parameters are stored
onboard the platform, and can be viewed and modified using the MobilePlanner software,
which is covered in the Mobile Robot Software Suite User's Guide.
The MobilePlanner application, running on your computer, is used to configure the many
high-level operating characteristics of the platform, including speeds and accelerations, sensor
safety zones, minimum battery level allowed before docking for recharging, which map to use,
and many other parameters. The MobilePlanner software typically communicates with the plat-
form over the wireless network. A direct connection, through the Maintenance Ethernet port on
the platform, is also possible.
CAUTION: The Operator Mode of the MobilePlanner software, which does
not require a license to run, should be protected with user ID and password
access, to prevent unauthorized operation of an AIV.
1
As configured either by the factory or through your own parameter changes.
 Loading...
Loading...








