5 EtherCAT Communications
5 - 6
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
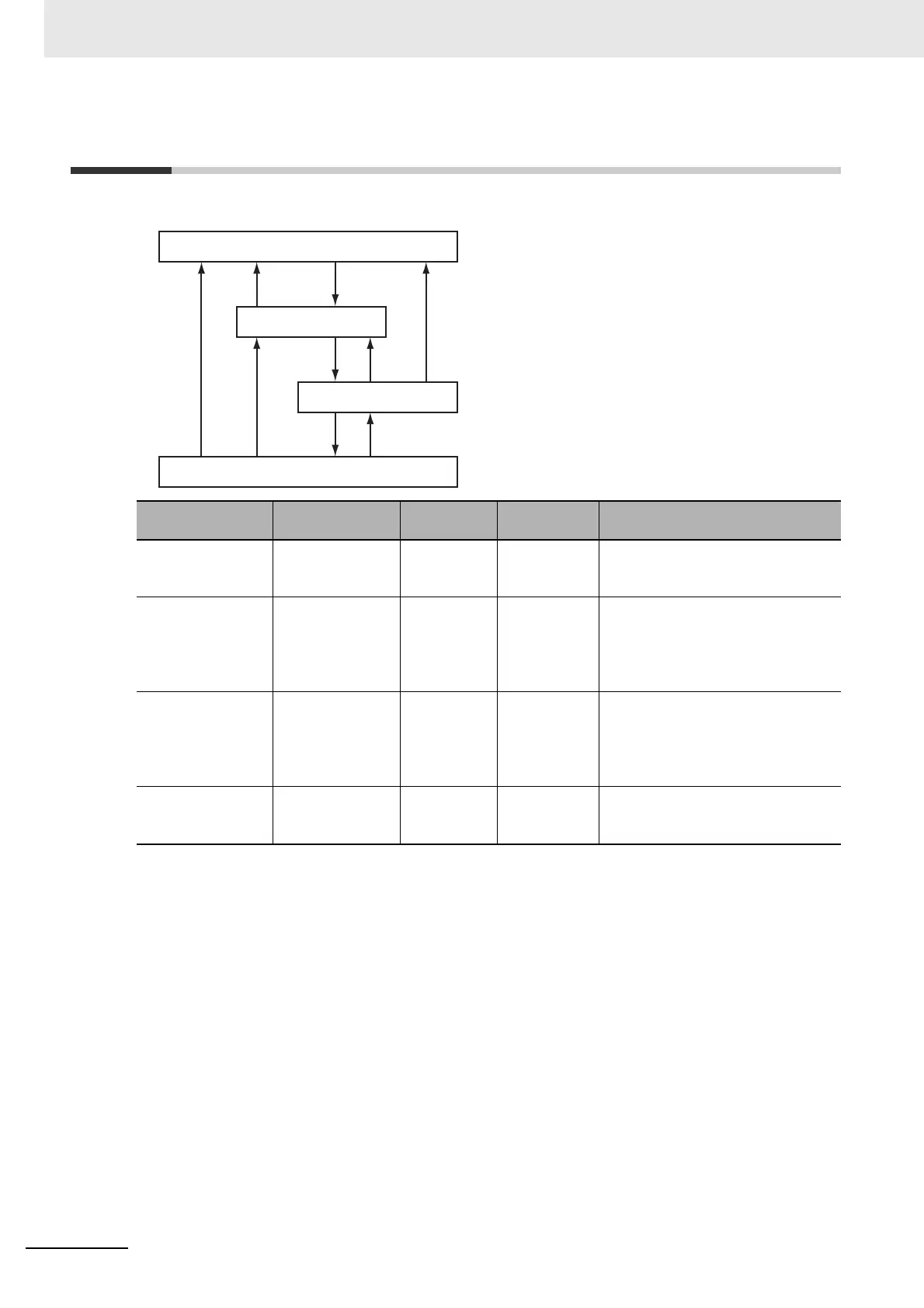
5-3 EtherCAT State Machine
The EtherCAT State Machine (ESM) of the EtherCAT slave is controlled by the EtherCAT master.
Note The Bootstrap mode is not supported.
State
SDO
communications
PDO
reception
PDO
transmission
Description
Init Not possible Not possible Not possible Communication initialization is in
progress. Communications are not
possible.
Pre-Operational Possible Not possible Not possible Only SDO communications are pos-
sible in this state. This state is
entered after initialization is com-
pleted. In this state, the network set-
tings are initialized.
Safe-Operational Possible Not possible Possible In this state, PDO transmissions are
possible in addition to SDO commu-
nications. PDO transmissions can be
used to send information such as sta-
tus from the Servo Drive.
Operational Possible Possible Possible This is a normal operating state.
PDO communications can be used to
control the Servomotor.
Safe-Operational
Pre-Operational
Initialization
Operational

 Loading...
Loading...

