7 Applied Functions
7 - 8
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
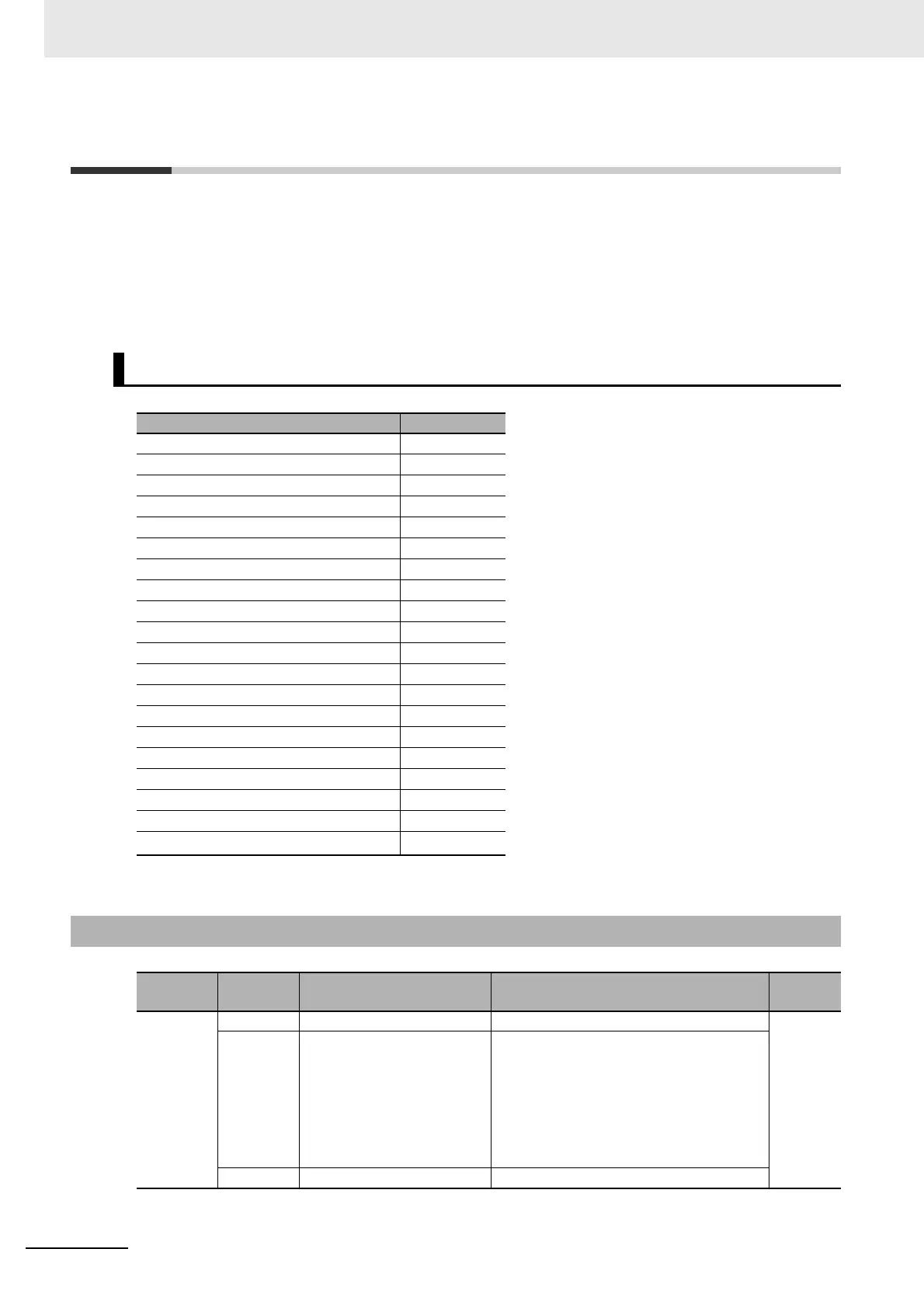
7-2 General-purpose Output Signals
The 1S-series Servo Drive provides 3 ports for general-purpose output signals to which you can allo-
cate function outputs in the Control I/O Connector (CN1). You can also set the logic for output signals
that can be allocated. Note that you cannot allocate more than one function to the same general-pur-
pose output signal.
Refer to 3-1-5 Control I/O Connector (CN1) Specifications on page 3-27 for I/O signal connection and
external signal processing.
Function Outputs That Can Be Allocated
Function output name Symbol
Error Output ERR
Servo Ready Output READY
Positioning Completion Output 1 INP1
Positioning Completion Output 2 INP2
Velocity Attainment Detection Output TGON
Torque Limit Output TLMT
Zero Speed Detection Output ZSP
Velocity Conformity Output VCMP
Warning Output 1 WARN1
Warning Output 2 WARN2
Velocity Limiting Output VLMT
Error Clear Attribute Output ERR-ATB
Remote Output 1 R-OUT1
Remote Output 2 R-OUT2
Remote Output 3 R-OUT3
Zone Notification Output 1 ZONE1
Zone Notification Output 2 ZONE2
Position Command Status Output PCMD
Distribution Completed Output DEN
External Brake Interlock Output
*1
*1. This function is available for the unit version 1.2 or later.
EXTBKIR
7-2-1 Objects Requiring Settings
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence
4650
---
Error Output Sets the output signal allocation and logic. P. 9-124
01 Port Selection Selects the port to be allocated.
bit 0: General Output 1 (OUT1)
bit 1: General Output 2 (OUT2)
bit 2: General Output 3 (OUT3)
0: Not allocated
1: Allocated
02 Logic Selection 1: Negative logic (NC contact)

 Loading...
Loading...

