11 Adjustment Functions
11 - 18
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
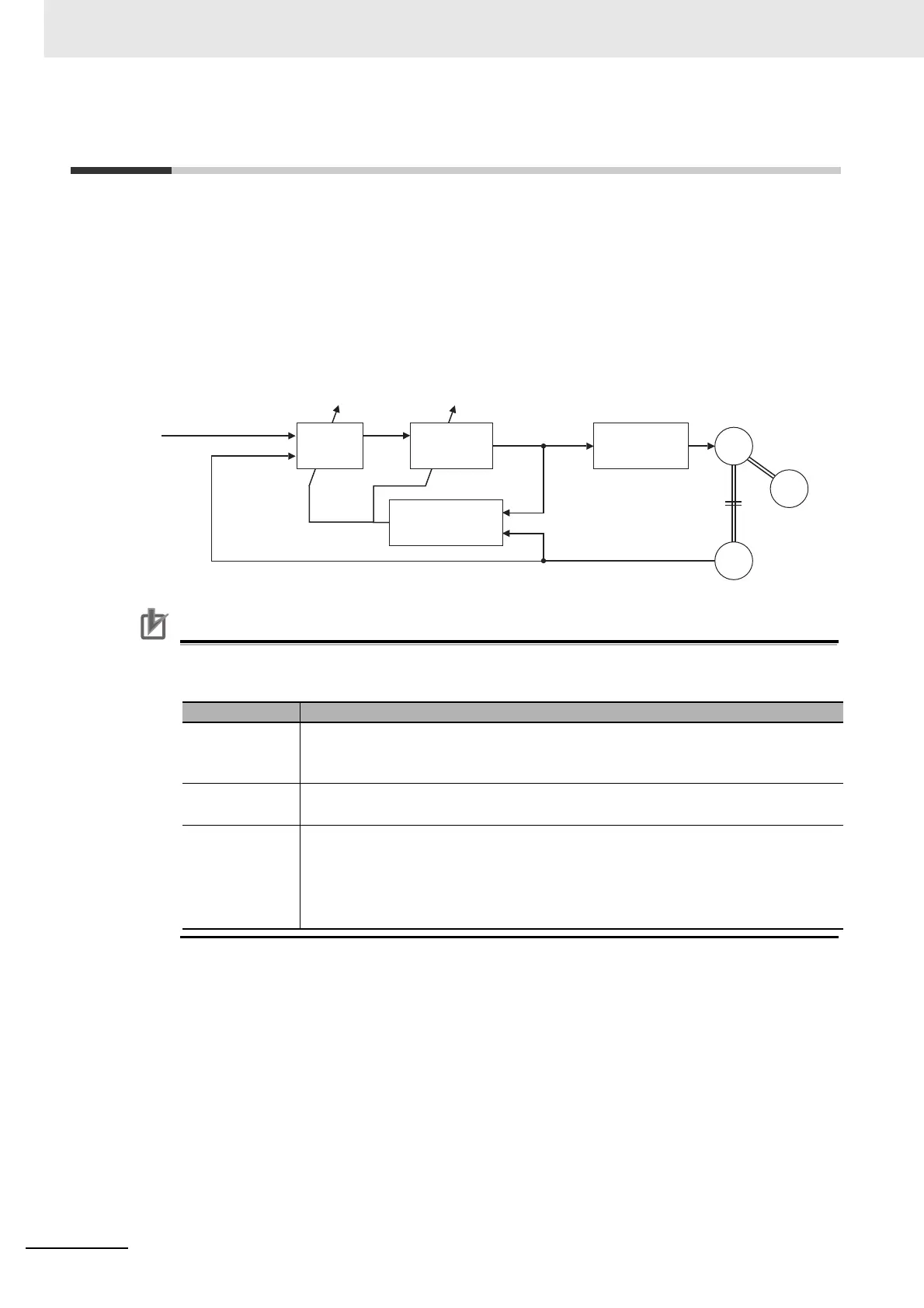
11-8 Load Characteristic Estimation
The Load Characteristic Estimation function estimates the load characteristics of the machine in
realtime, and sets values of the inertia ratio, viscous friction coefficient, unbalanced load compensation,
and dynamic friction compensation automatically according to the result of estimation.
You can check the values that are set automatically with Machine – Inertia Ratio Display (3001-81
hex), Torque Compensation – Viscous Friction Coefficient Display (3310-81 hex), Unbalanced
Load Compensation Display (3310-82 hex), and Dynamic Friction Compensation Display
(3310-83 hex and 3310-84 hex).
This Load Characteristic Estimation function is enabled in the position control, velocity control, and
torque control.
Precautions for Correct Use
• The Load Characteristic Estimation function may not operate properly under the following
conditions. In such cases, set the related objects manually.
Conditions that interfere with the Load Characteristic Estimation function
Load inertia • If the load inertia is small, i.e. less than 3 times the rotor inertia or large, i.e. the
applicable load inertia or more
• If the load inertia changes easily
Load • If the machine rigidity is extremely low
• If there is a non-linear element (play), such as a backlash
Operation • If the speed continues at lower than 100 r/min
• If the acceleration/deceleration is 2,000 r/min/s or lower
• If the acceleration/deceleration torque is small compared with the unbalanced load
and the friction torque
• If the speed or torque oscillates due to the high gain or small effect of each filter.
Motor
Encoder
Position/Velocity command
Current control
Torque command
Load
Friction torque
compensation
Position/Velocity
feedback
Load characteristic
estimation
Position/
Velocity
control
Position/Velocity
feedback

 Loading...
Loading...

