7 - 37
7 Applied Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
7-10 Gain Switching Function
7
7-10-2 Mode Selection
The Mode Selection is used to set the condition to switch between Gain 1 and Gain 2.
When you select Gain 1, control is performed based on 1st Position Control Gain, 1st Velocity Con-
trol Gain, and 1st Torque Command Filter. When you select Gain 2, control is performed based on
2nd Position Control Gain, 2nd Velocity Control Gain, and 2nd Torque Command Filter.
The following is an operation example.
Mode Selection:
Gain Switching in Position Control - Mode Selection (3212-01 hex) = 0: Gain1
Gain Switching in Velocity Control - Switching Selection (3222-01 hex) = 1: Gain 2
Switching when Filter Switching in Torque Control - Mode Selection (3232-01 hex) = 2: Input com-
mand (G-SEL)
If Mode Selection is set to 0, 1st Position Control Gain (3213 hex), 1st Velocity Control Gain (3223
hex), and 1st Torque Command Filter (3233 hex) are used.
If Mode Selection is set to 1, 2st Position Control Gain (3214 hex), 2st Velocity Control Gain (3224
hex), and 2st Torque Command Filter (3234 hex) are used.
If Mode Selection is set to 2, you can switch between Gain 1 and Gain 2 by changing the value of bit
24: G-SEL of Digital outputs - Physical outputs (60FE-01 hex) via EtherCAT communications.
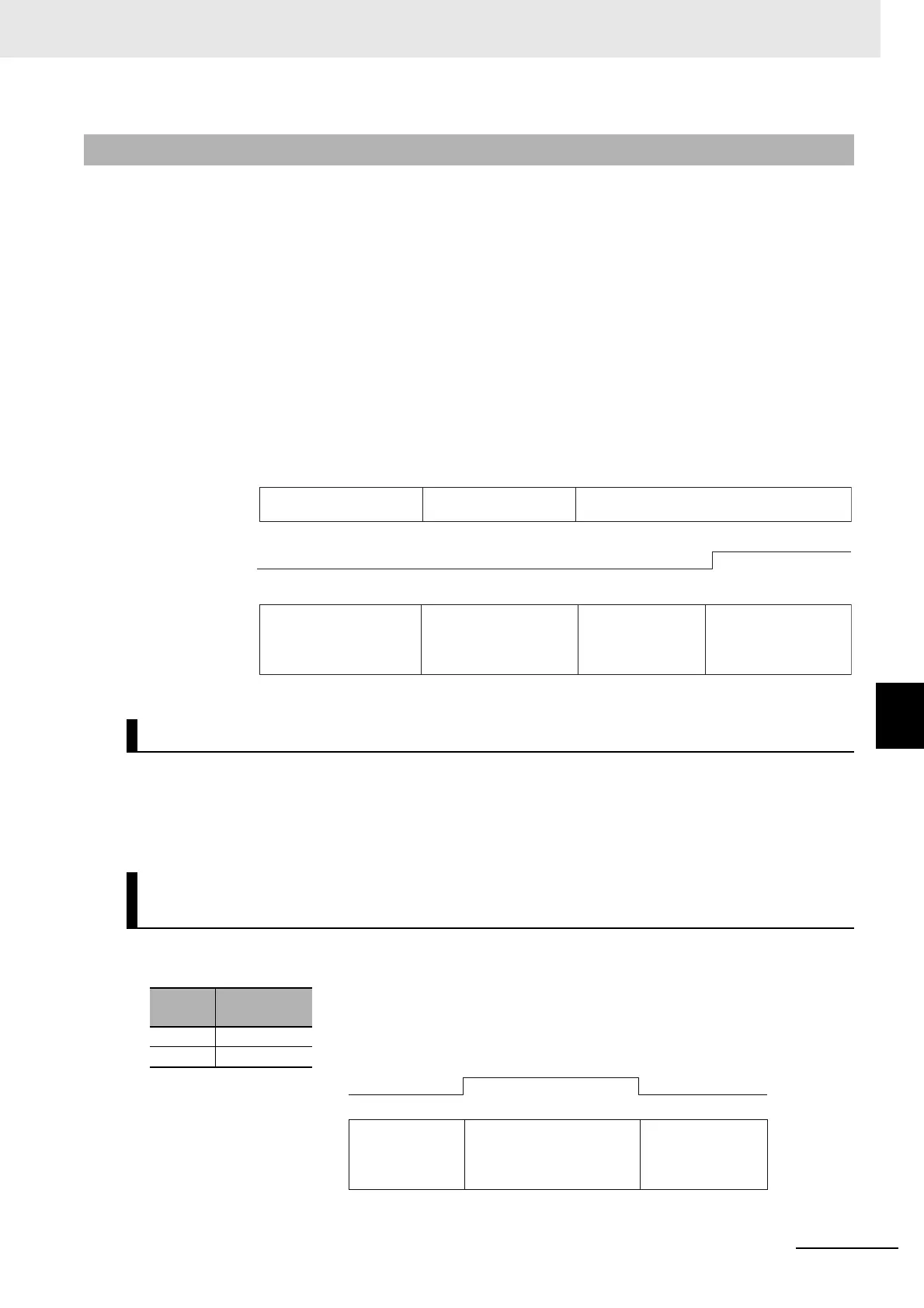
7-10-2 Mode Selection
When Mode Selection = 0: Always Gain 1 or 1: Always Gain 2
When Mode Selection = 2: Gain switching command input via Ether-
CAT communications
Set
value
Description
0Gain 1
1Gain 2
Operation
mode
G-SEL
Position control gain
Velocity control gain
Torque command filter
Position control Velocity control Torque control
Gain 1 Gain 2 Gain 1 Gain 2
01
G-SEL
Position control gain
Velocity control gain
Torque command filter
Gain 1 Gain 1Gain 2
0 1
0

 Loading...
Loading...

