11 Adjustment Functions
11 - 16
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
1 Adjust the position loop gain and the velocity loop gain.
In the easy tuning, manual tuning, advanced tuning, etc., Adjust 1st Position Control Gain or
2nd Position Control Gain (1st: 3213 hex, 2nd: 3214 hex), 1st Velocity Control Gain or 2nd
Velocity Control Gain (1st: 3223 hex, 2nd: 3224 hex), and 1st Torque Command Filter or
2nd Torque Command Filter (1st: 3233 hex, 2nd: 3234 hex).
2 Measure the vibration frequency at the tip of the mechanical unit.
Measure the vibration frequency by using a device such as a laser displacement meter, servo
accelerometer, and acceleration pick-up.
Set the measured vibration frequency in one of 1st to 4th Frequency (01 hex, 03 hex, 05 hex,
07 hex) of Damping Filter 1 or 2 (1: 3013 hex, 2: 3014 hex). Also set Damping Filter 1 Selec-
tion (01 hex) or Damping Filter 2 Selection (02 hex) of Damping Control (3012 hex) so that
the frequency set in the above step is enabled.
If the frequency is set in 1st Frequency (01 hex) of Damping Filter 1 (3013 hex), set Damping
Filter 1 Selection (01 hex) of Damping Control (3012 hex) to 1.
If vibration persists after you set the frequency, increase or decrease the damping frequency to
find a proper frequency at which vibration decreases.
3 Make the damping filter settings.
Set the corresponding damping time coefficient of Damping Filter 1 or Damping Filter 2 (1:
3013 hex, 2: 3014 hex).
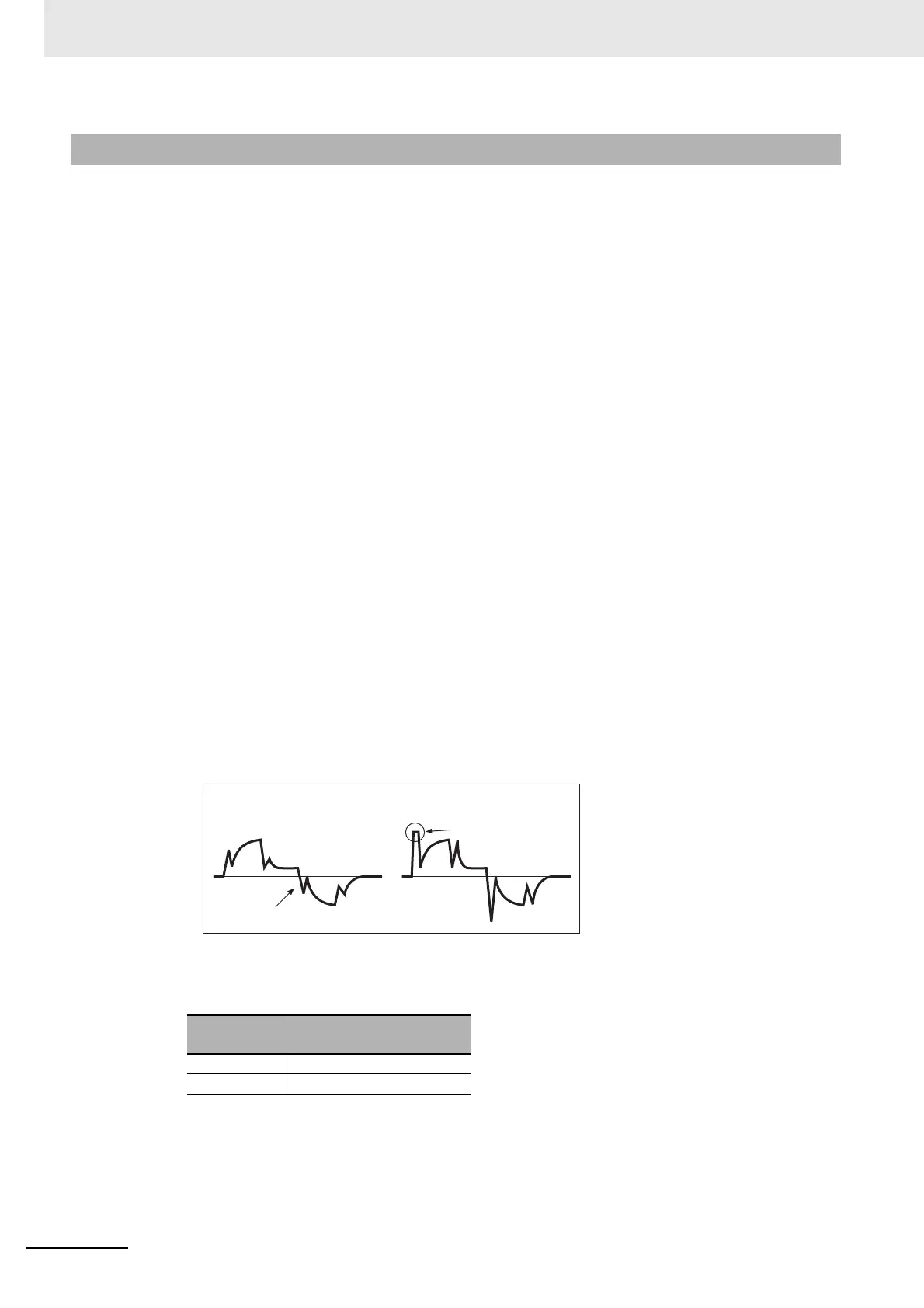
First, set it to 100% and check the torque waveform during operation. Setting a value smaller
than 100% for the damping time can shorten the vibration suppression time, but it increases the
maximum operation speed and torque command. Set the damping time within a range in which
the maximum motor velocity is not exceeded and torque saturation does not occur. The effects
of vibration suppression will be lost if the maximum motor velocity is exceeded or torque satura-
tion occurs.
Also, setting a large value for the damping time can reduce the torque command while the set-
ting time gets long.
4 Set Damping Control (3012 hex).
You can switch Damping filter 1 and 2 according to the conditions of the machine vibration.
11-7-2 Operating Procedure
Set value
(hex)
Description
01 Damping Filter 1 Selection
02 Damping Filter 2 Selection
Torque command
Torque saturation
Small damping time
coefficient
Appropriate damping
time coefficient

 Loading...
Loading...

