7 Applied Functions
7 - 44
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
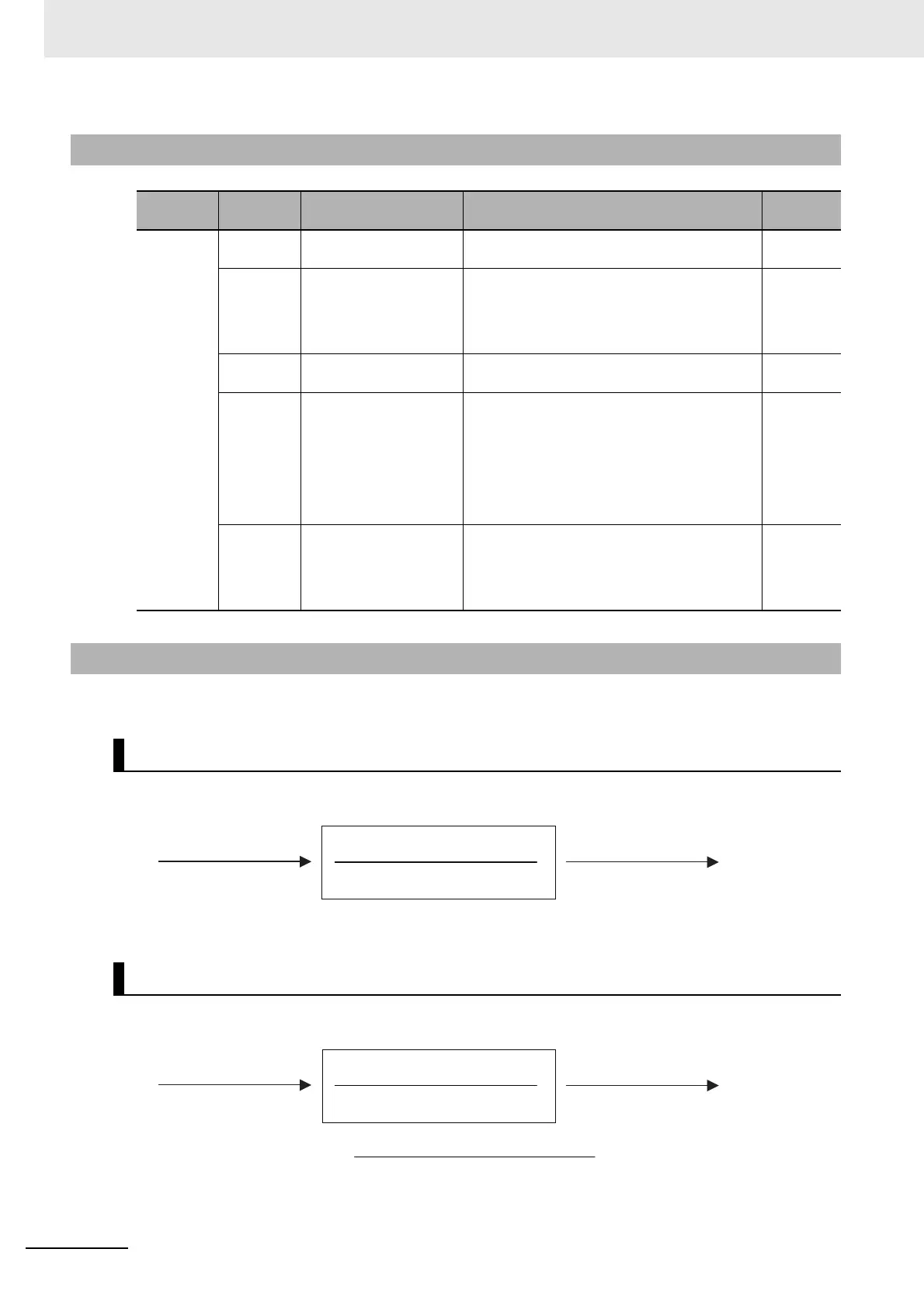
You can change the number of output pulses by setting the dividing ratio.
The number of output pulses is determined as follows when Encoder Dividing Pulse Output - Divid-
ing Denominator (4620-03 hex) is set to 0.
The number of output pulses is determined as follows when Encoder Dividing Pulse Output - Divid-
ing Denominator (4620-03 hex) is set to a value other than 0.
7-12-1 Objects Requiring Settings
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence
4620
---
Encoder Dividing Pulse
Output
Sets the encoder dividing pulse output. P. 9-114
01 Enable Selects whether to enable or disable the
encoder dividing pulse output function.
0: Disabled
1: Enabled
P. 9- 114
02 Dividing Numerator Sets the number of output pulses per motor
rotation.
P. 9- 114
03 Dividing Denominator For applications for which the number of out-
put pulses per rotation is not an integer, when
this set value is set to a value other than 0, the
number of output pulses per motor rotation
can be set by the use of the dividing ratio
which is calculated from the dividing numera-
tor and dividing denominator.
P. 9- 115
04 Output Reverse Selec-
tion
Selects whether to reverse the encoder divid-
ing pulse output or not.
0: Not reverse
1: Reverse
P. 9- 115
7-12-2 Dividing Ratio
When Dividing Denominator (4620-03 hex) = 0
When Dividing Denominator (4620-03 hex) ≠ 0
Dividing Numerator (4620-02 hex) × 4
Encoder resolution
Output pulses
Number of output pulses per rotation = Encoder Dividing Numerator (4620-02 hex) × 4
Encoder pulses
Dividing Numerator (4620-02 hex)
Output pulses
Number of output
pulses per rotation
Encoder pulses
Dividing Denominator (4620-03 hex)
Dividing Numerator (4620-02 hex)
Dividing Denominator (4620-03 hex)
x Encoder resolution
=

 Loading...
Loading...

