11 - 27
11 Adjustment Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
11-11 Friction Torque Compensation Func-
tion
11
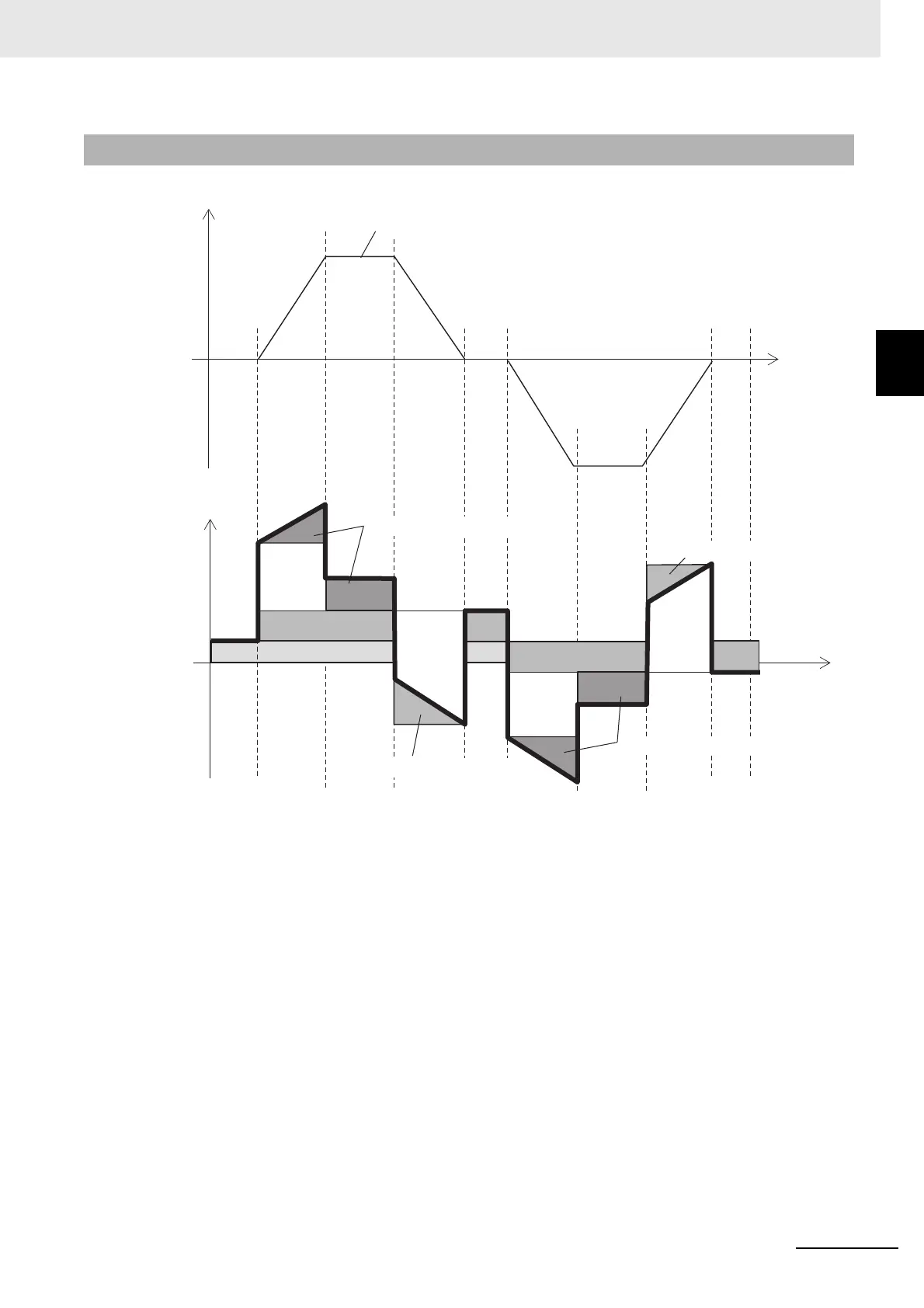
11-11-3 Operation Example
The friction torque compensation is applied according to the operation as shown in the drawing below.
Note The dynamic friction compensation holds the compensation value until the command direction changes, in
order to sustain the position during stabilization.
By setting the torque command value in Unbalanced Load Compensation (3310-02 hex), you can
reduce the variations of positioning operations that occur depending on the movement directions. This
object is useful when a constant amount of unbalanced load torque is always applied to the Servomotor
at axes such as a vertical axis.
By setting the friction torque for each rotation direction in Positive Dynamic Friction Compensation
(3310-03 hex) and Negative Dynamic Friction Compensation (3310-04 hex), you can reduce deteri-
oration of and inconsistencies in the positioning stabilization time due to dynamic friction. These objects
are useful for loads that require a larger amount of dynamic friction torque for a radial load, such as the
belt-driven shaft.
11-11-3 Operation Example
Viscous friction compensation
Time
Time
Command velocity
Negative
direction
Positive
direction
Viscous friction compensation
Viscous friction compensation
Unbalanced Load Compensation
Positive Dynamic
Friction Compensation
Viscous friction compensation
Negative Dynamic
Friction Compensation

 Loading...
Loading...

