A - 7
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-1 CiA 402 Drive Profile
A
A-1-5 Homing Mode Specifications
This section describes the specifications of the Homing mode of the 1S-series Servo Drives with built-in
EtherCAT communications.
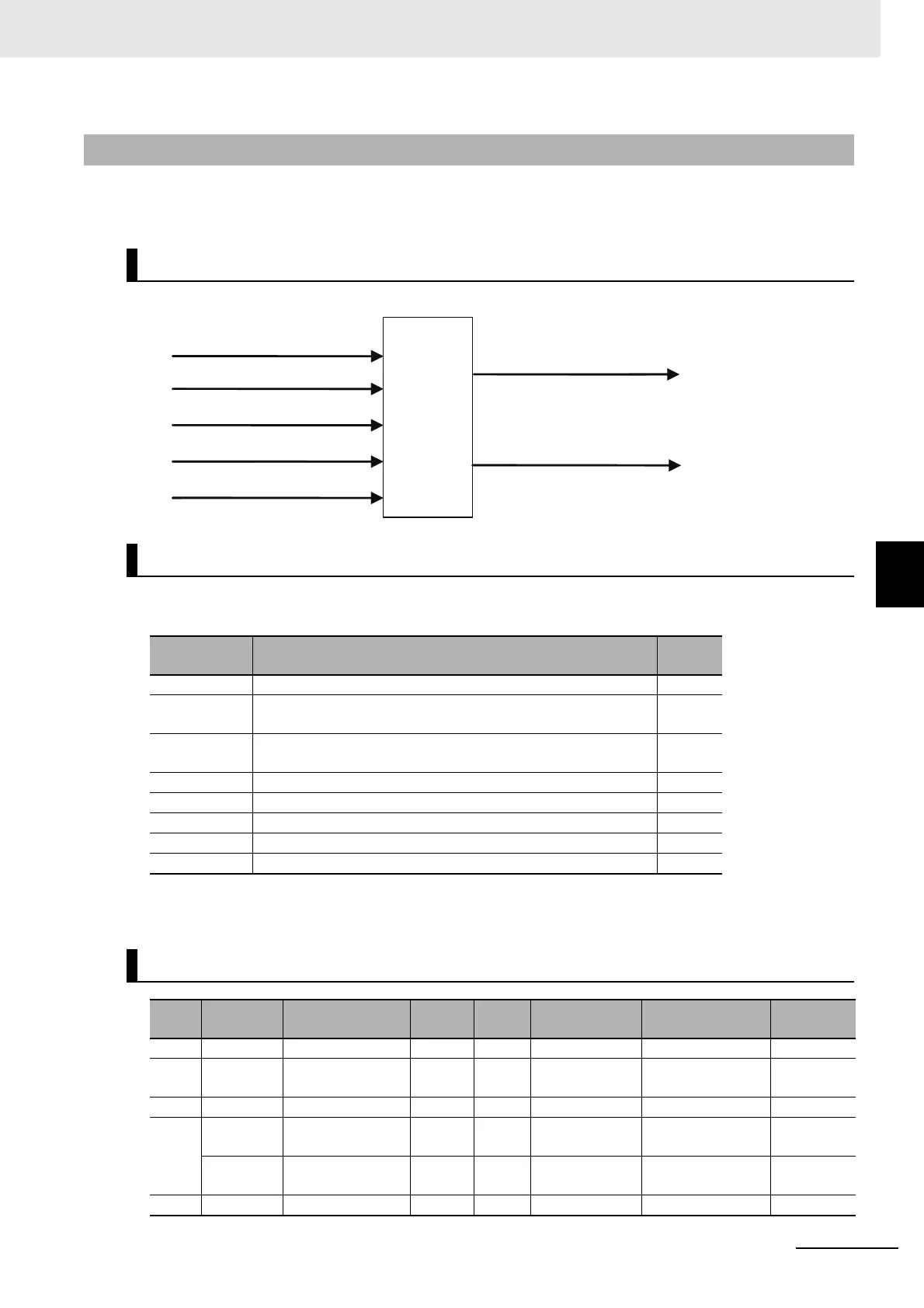
The configuration of the Homing mode is as follows:
The following homing methods are supported by 1S-series Servo Drives with built-in EtherCAT commu-
nications:
You can check the homing method supported by the Servo Drive in Supported homing methods
(60E3 hex).
A-1-5 Homing Mode Specifications
Homing Mode Configuration
Supported Homing Methods
Homing
method
Description
Refer-
ence
0 Not specified –
8 Homing by Home Proximity Input and home signal (positive
operation start)
P. A -9
12 Homing by Home Proximity Input and home signal (negative
operation start)
P. A -9
19 Homing without home signal (positive operation start) P. A-10
20 Homing without home signal (negative operation start) P. A-10
33 Homing with home signal (negative operation start) P. A-11
34 Homing with home signal (positive operation start) P. A-11
37 Present home preset P. A-11
Related Objects
Index
(hex)
Subindex
(hex)
Name Access Size Unit Setting range
Default
setting
6040 00 Controlword W U16 --- 0 to FFFF hex 0000 hex
6060 00 Modes of opera-
tion
W INT8 --- 0 to 10 0
6098 00 Homing method RW INT8 --- 1 to 37 0
6099 01 Speed during
search for switch
RW U32 Command
unit/s
0 to 2,147,483,647 5,000
02 Speed during
search for zero
RW U32 Command
unit/s
1 to 2,147,483,647 5,000
6041 00 Statusword RO U16 --- --- ---
Controlword
(6040 hex)
Homing method
(6098 hex)
Homing speeds
(6099 hex)
Statusword
(6041 hex)
Homing acceleration
(609A hex)
Home offset
(607C hex)
Position demand value
(6062 hex) or
Position demand internal value
(60FC hex)
Homing

 Loading...
Loading...

