9 - 25
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-2 Common Control Objects
9
9-2-13 3040 hex: Profile Command
• Gives the velocity limit status in the torque control.
Description of Set Values
Sets the profile command.
• Sets the velocity limit value in the Cyclic synchronous torque mode (cst), Profile position mode (pp),
and Profile velocity mode (pv).
• Mirror object of 607F hex
• Sets the velocity in the Profile position mode (pp).
• Mirror object of 6081 hex
• Sets the acceleration rate in the Profile position mode (pp) and Profile velocity mode (pv).
• Mirror object of 6083 hex
• Sets the deceleration rate in the Profile position mode (pp) and Profile velocity mode (pv).
• Mirror object of 6084 hex
Subindex 81 hex: Status
Set
value
Description
0 Velocity limit not applied
1 Velocity limit applied
9-2-13 3040 hex: Profile Command
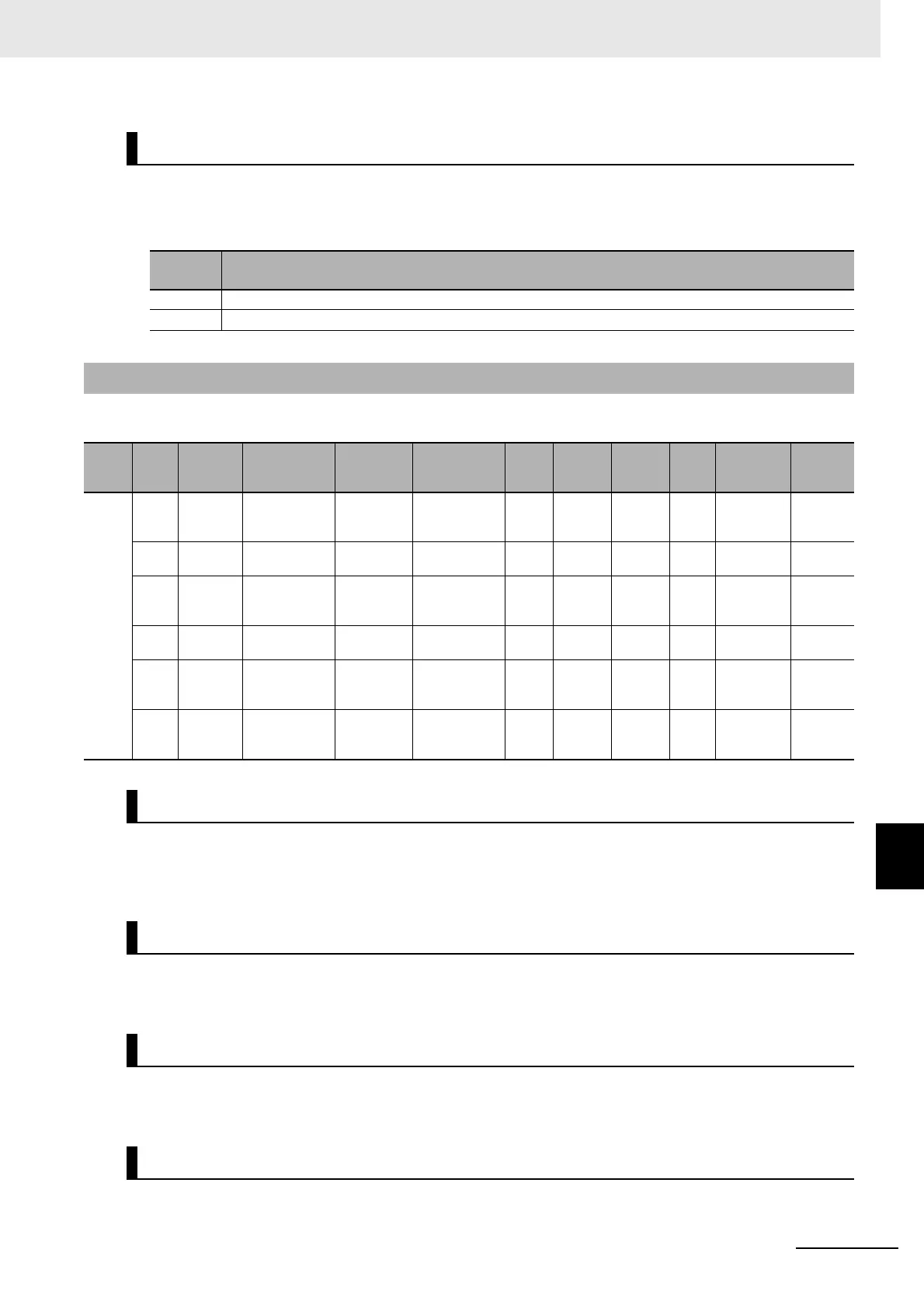
Index
(hex)
Sub-
index
(hex)
Object
name
Setting range Unit
Default set-
ting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes
of oper-
ation
3040 --- Profile
Com-
mand
--- --- --- --- --- --- --- Possible ---
00 Number
of entries
--- --- F4 hex --- 1 byte
(U8)
RO --- --- ---
F1 Max Pro-
file
Velocity
0 to
2,147,483,647
Command
unit/s
2,147,483,647 A 4 bytes
(U32)
W --- --- cst, pp,
pv
F2 Profile
Velocity
0 to
2,147,483,647
Command
unit/s
0 A4 bytes
(U32)
W --- --- pp
F3 Profile
Acceler-
ation
1 to
2,147,483,647
Command
unit/s
2
1,000,000 A 4 bytes
(U32)
W --- --- pp, pv
F4 Profile
Deceler-
ation
1 to
2,147,483,647
Command
unit/s
2
1,000,000 A 4 bytes
(U32)
W --- --- pp, pv
Subindex F1 hex: Max Profile Velocity
Subindex F2 hex: Profile Velocity
Subindex F3 hex: Profile Acceleration
Subindex F4 hex: Profile Deceleration

 Loading...
Loading...

