5 - 25
5 EtherCAT Communications
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
5-9 Cable Redundancy Function
5
5-9-5 Relation between the Network Configuration Information and the Actual Configuration
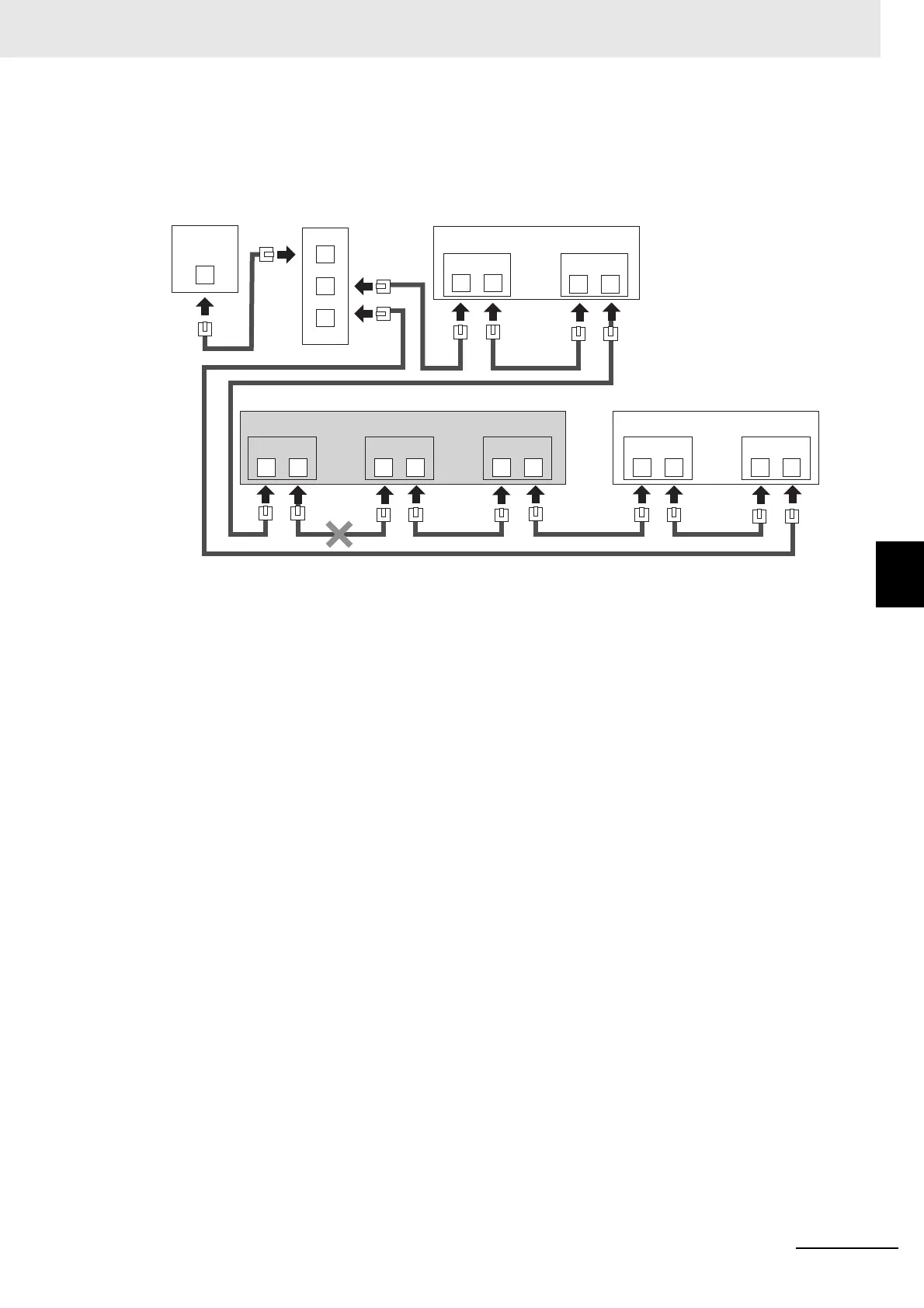
The following example shows a case of No. 4. In this example, the communications status changes
from the normal status to the ring disconnection status, and then the power supply to Device Y is turned
OFF, which turns OFF the power supply to Slave C to E and causes a minor fault. Slave A, B, F, and G
continue communications even after the minor fault occurs.
EtherCAT Master
Slave A
Junction Slave
Device X
Slave B
Slave C Slave D Slave F Slave GSlave E
Device ZDevice Y (Power OFF)
Open circuit

 Loading...
Loading...

