QSHT 5700 Inverter Safe Torque-off Function
Hardwired Safe Torque-off
272 MagneMotion
Rockwell Automation Publication MMI-UM007F-EN-P - September 2020
Troubleshoot the Safe Torque-off Function
For QSHT 5700 inverter hardwired (STO) fault code descriptions and possible solutions, see
Table 7-2 on page 267 or the Knowledgebase KB Answer ID 1091727, Kinetix 5700 drive
fault codes, and 2198-UM002, Kinetix 5700 Servo Drive User Manual.
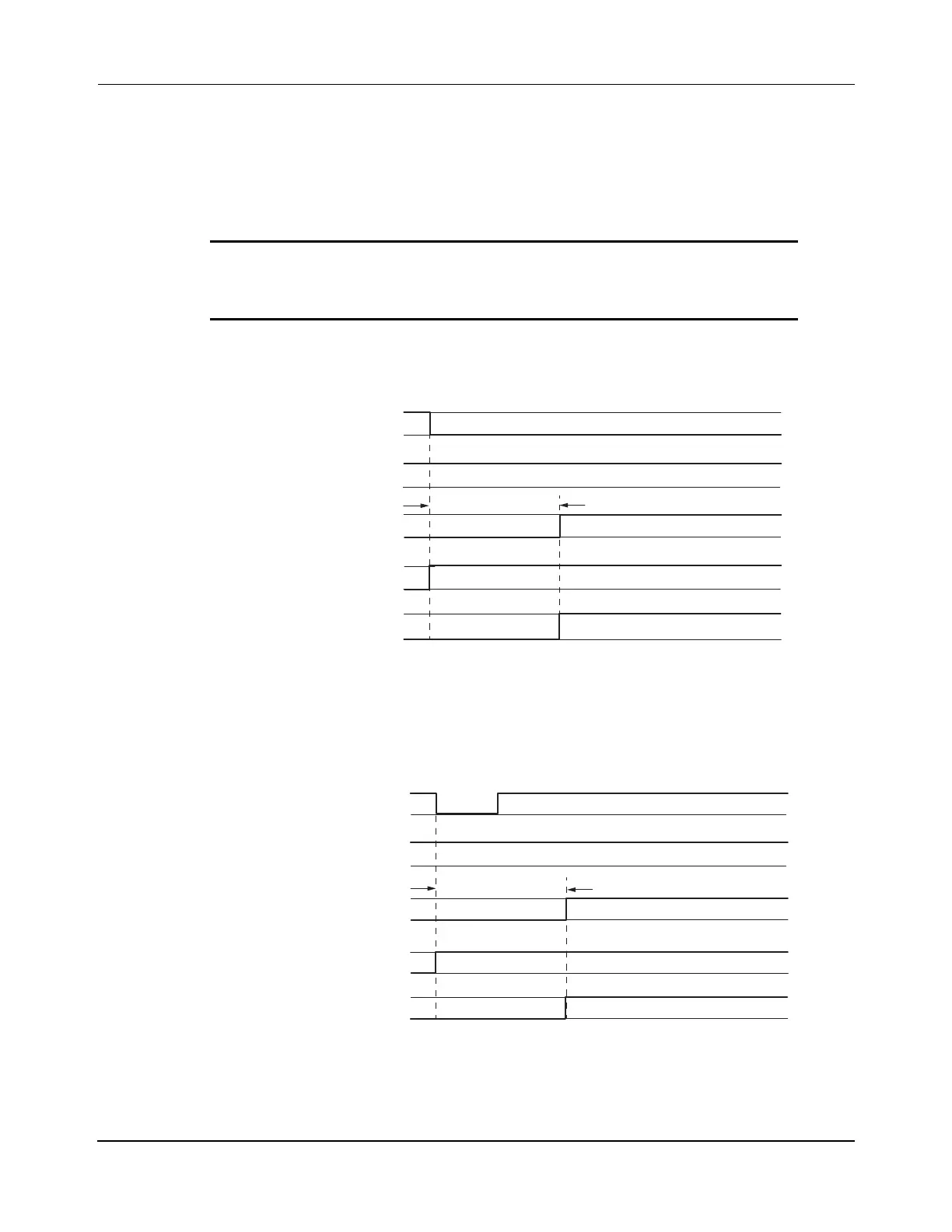
Figure 7-2 illustrates when the safe torque-off mismatch is detected and GuardStopInputFault
is posted.
Figure 7-2: System Operation in the Event of STO Inputs Discrepancy (fault case 1)
When one safety input is turned OFF, the second input must also be turned OFF within 1 sec-
ond, otherwise a fault is asserted (see Figure 7-3). The fault is asserted even if the first safety
input is turned ON again, without the second input transitioning to the OFF state.
Figure 7-3: System Operation in the Event of STO Inputs Discrepancy (fault case 2)
IMPORTANT If both STO inputs are not in the OFF state simultaneously,
within 100 ms, or after 1 second, then GuardStopInputFault
is posted for both stator inverter outputs.
24V DC
24V DC
0V DC
0V DC
0
1
0
1
0
1
No Fault
1 Second Discrepancy Limit
Faulted
SS_IN_CH0
SS_IN_CH1
GuardStopInputFault
SafeTorqueOffFault
GuardStopRequestStatus
Stop Requested
Faulted
No Fault
24V DC
24V DC
0V DC
0V DC
0
1
0
1
0
1
GuardStopRequestStatus
SS_IN_CH0
SS_IN_CH1
SafeTorqueOffFault
GuardStopInputFault
No Fault
1 Second Discrepancy Limit
Faulted
Stop Requested
Faulted
No Fault
 Loading...
Loading...

