User defined
tools
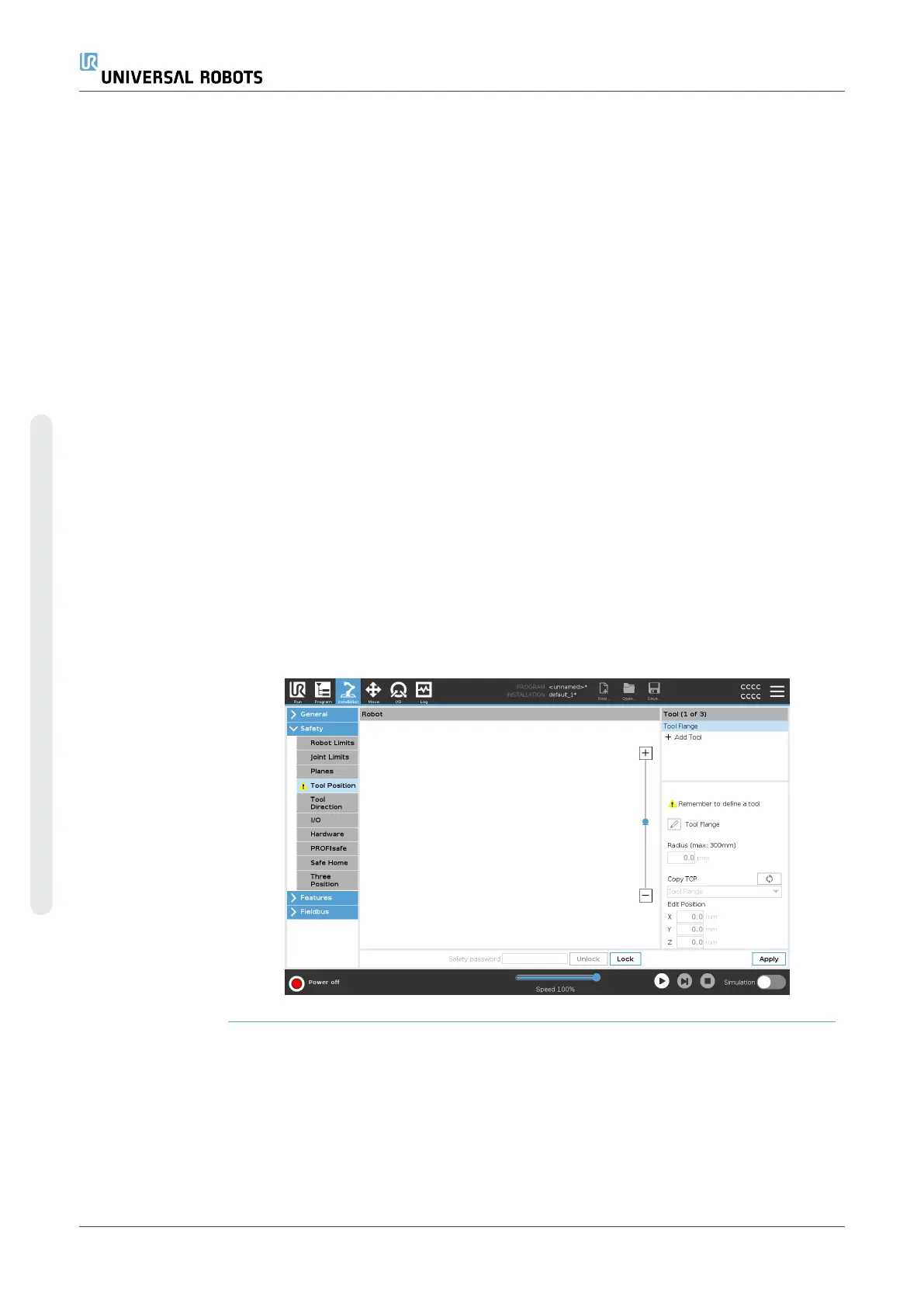
For the user defined tools, the user can change:
•
Radius to change the radius of the tool sphere. The radius is considered when
using safety planes. When a point in the sphere passes a reduced mode trigger
plane, the robot switches to
Reduced
mode. The safety system prevents any
point on the sphere from passing a safety plane (see17.8 Software Safety
Restrictionson page153).
•
Position to change the position of the tool with respect to the tool flange of the
robot. The position is considered for the safety functions for tool speed, tool
force, stopping distance and safety planes.
You can use an existing Tool Center Point as a base for defining new tool positions. A
copy of the existing TCP, predefined in General menu, in TCP screen, can be accessed
in Tool Position menu, in Copy TCP drop-down list.
When you edit or adjust the values in the Edit Position input fields, the name of the TCP
visible in the drop down menu changes to custom, indicating that there is a difference
between the copied TCP and the actual limit input. The original TCP is still available in
the drop down list and can be selected again to change the values back to the original
position. The selection in the copy TCP drop down menu does not affect the tool name.
Once you apply your Tool Position screen changes, if you try to modify the copied TCP
in the TCP configuration screen, a warning icon appears to the right of the Copy TCP
text. This indicates that the TCP is out of sync i.e. the information in the properties field
is not updated to reflect modifications that may have been made to the TCP. The TCP
can be synced by pressing the sync icon (see).
The TCP does not have to be synced in order to define and use a tool successfully.
You can rename the tool by pressing the pencil tab next to the displayed tool name. You
can also determine the Radius with an allowed range of 0-300 mm. The limit appears in
the graphics pane as either a point or a sphere depending on radius size.
UR10e 164 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










