Example:Wait
for f
(x)expression
You can add a wait command with an expression that waits for two or more conditions
to be true or false depending on configuration when using a machine and a conveyor
sensor. Both the machine and the conveyor become ready for the robot.
19.7.5. Set
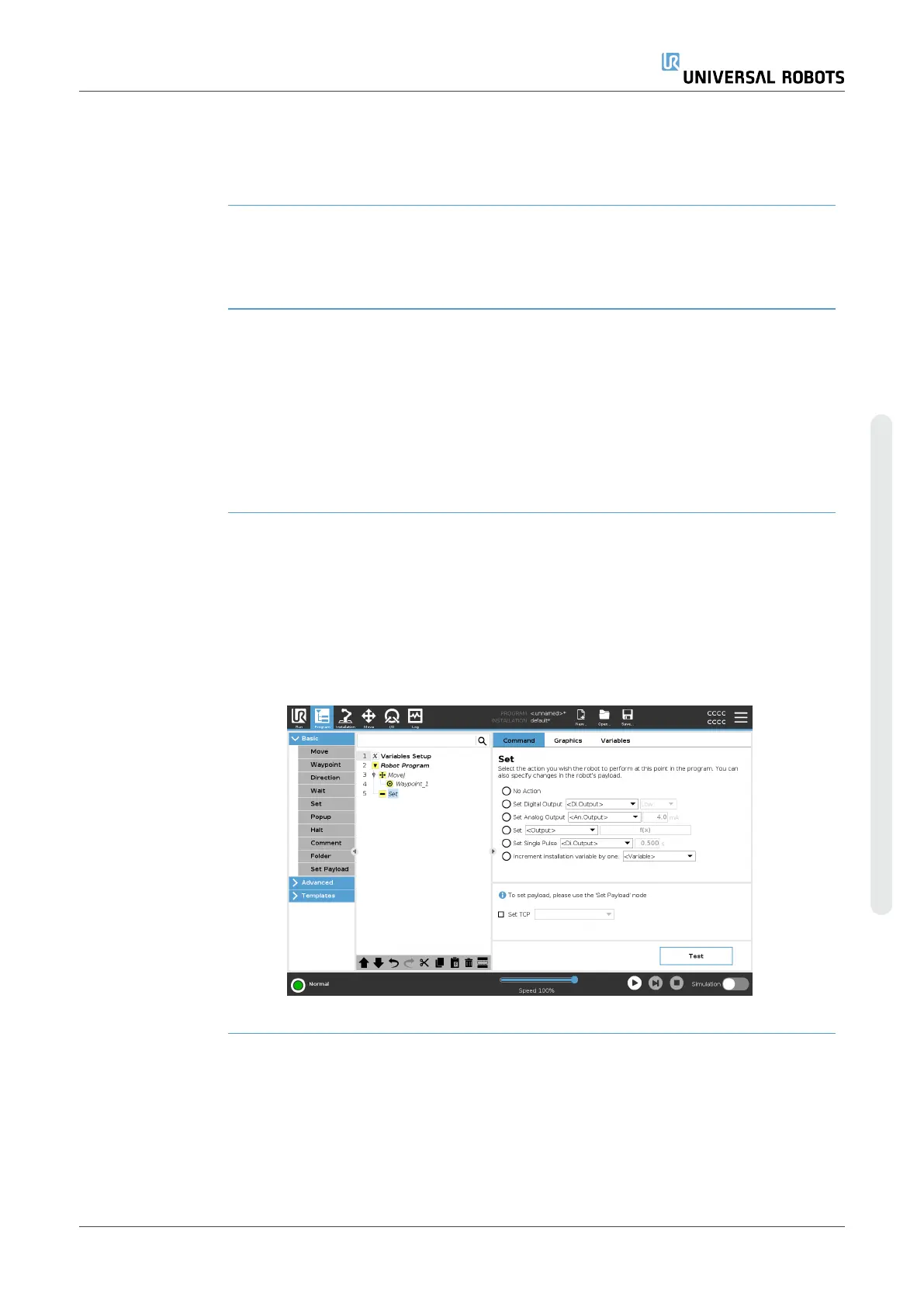
Description The Set command is one of the most often used commands. The Set command can
turn external devices on and off. The Set command can also increase or decrease
current/voltage to external devices.
You can always test your setup by using the test button in the right lower corner of the
screen.
See the following sections about using Set:
The robot uses different Set commands.
See the Set command types below.
No Action This is used in combination with setting the active TCP.
To add a No Action to a robot program
1. In your Robot Program, select the place or node where you wish to add a Set
command.
2. Under Basic, tap Set.
3. Select No Action
Set digital output The digital output should be planned as a start/stop or on/off action.
User Manual 229 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










