Description When switching between safety modes during events (i.e., Reduced Mode Input,
Reduced Mode Trigger Planes, Safeguard Stops, and Three-Position Enabling
Device), the Robot Arm aims to use 0.4s to create a "soft" transition. Existing
applications have unchanged behavior which corresponds to the "hard" setting. New
installation files default to the "soft" setting.
Adjusting
Acceleration/Deceleration
Settings
1. In the Header, tap Installation.
2. In the In the Side Menu on the left, under General, select Smooth
Transition.
3. Select Hard to have a higher acceleration/deceleration
or select Soft for the smoother default transition setting.
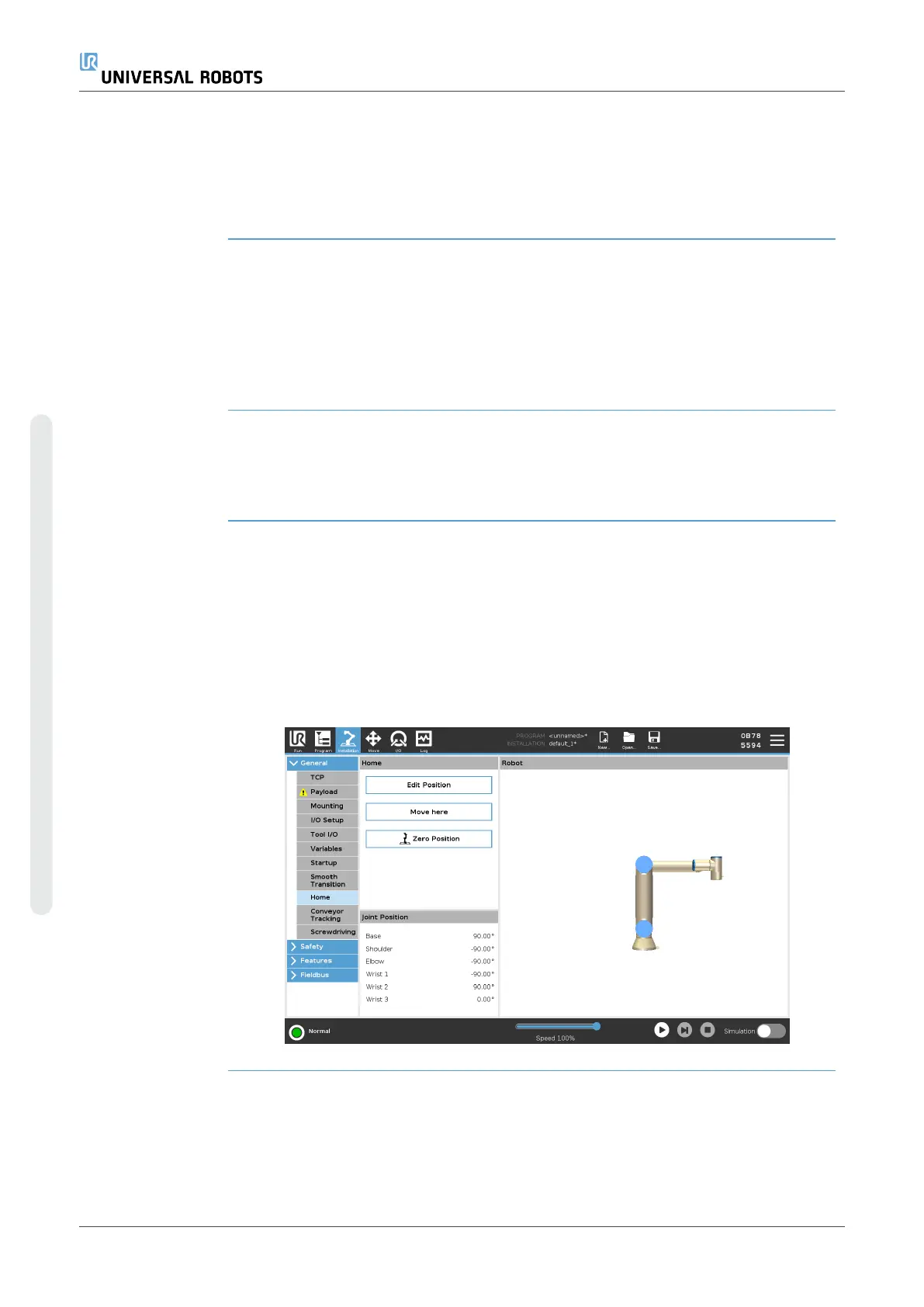
20.9. Home
Description Home is a user-defined return position for the Robot Arm. Once defined, the Home
Position is available when creating a robot program. You can use the Home Position to
define a Safe Home Position. (See17.9 Safe Home Positionon page167) Use the
Home screen buttons for the following:
•
Edit Position modifies a Home Position.
•
Move here moves the Robot Arm to the defined Home Position.
•
Zero Position returns the Robot Arm to an upright position.
UR10e 294 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










