2.10.2. Configurable Safety Functions
Description Universal Robots robot safety functions, as listed in the table below, are in the robot
but are meant to control the robot system i.e. the robot with its attached tool/end
effector. The robot safety functions are used to reduce robot system risks determined
by the risk assessment. Positions and speeds are relative to the base of the robot.
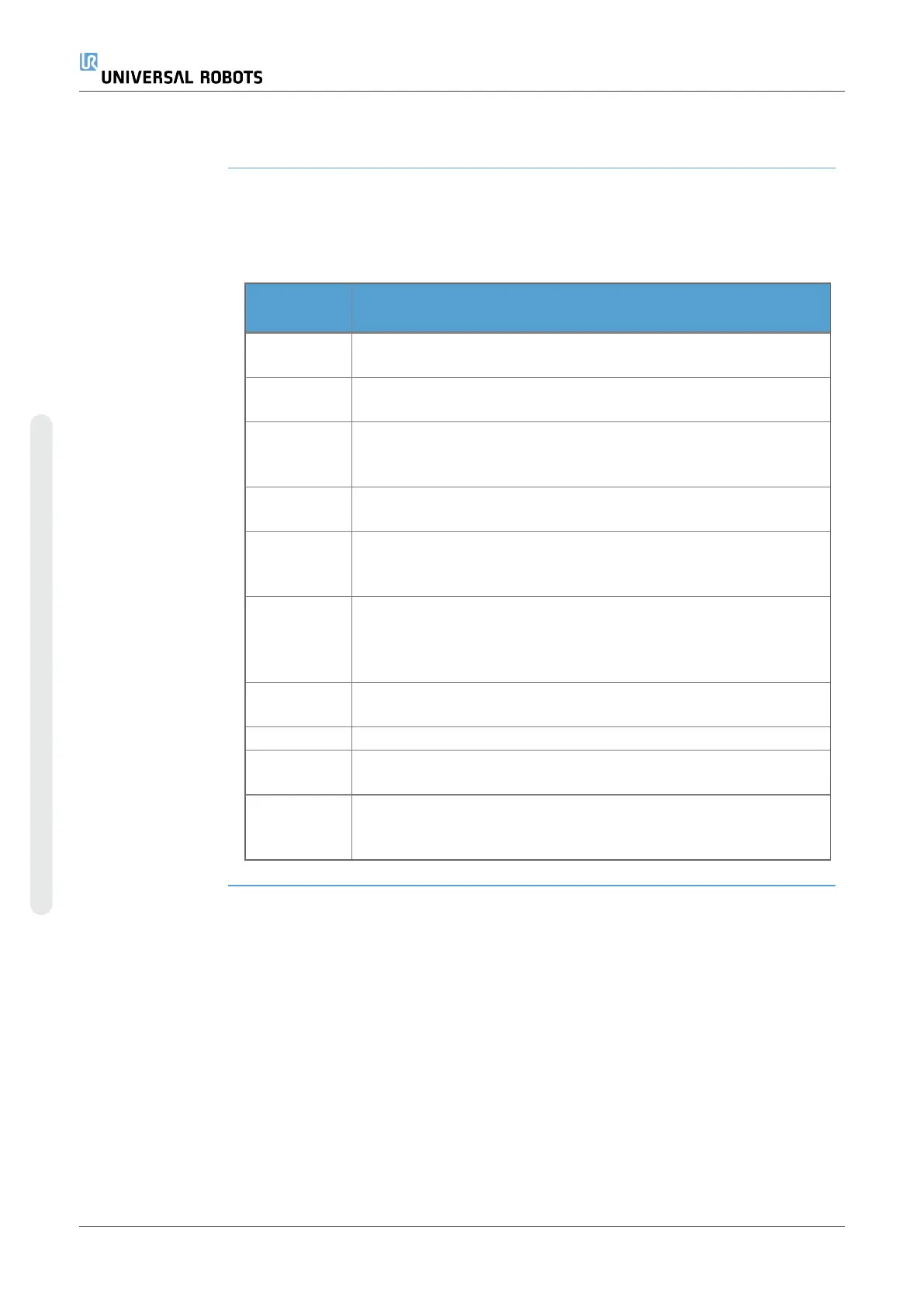
Safety
Function
Description
Joint Position
Limit
Sets upper and lower limits for the allowed joint positions.
Joint Speed
Limit
Sets an upper limit for joint speed.
Safety
Planes
Defines planes, in space, that limit robot position. Safety planes limit
either the tool/end effector alone or both the tool/end effector and
the elbow.
Tool
Orientation
Defines allowable orientation limits for the tool.
Speed Limit
Limits maximum robot speed. The speed is limited at the elbow, at
the tool/end effector flange, and at the center of the user-defined
tool/end effector positions.
Force Limit
Limits maximum force exerted by the robot tool/end effector and
elbow in clamping situations. The force is limited at the tool/end
effector, elbow flange and center of the user-defined tool/end
effector positions.
Momentum
Limit
Limits maximum momentum of the robot.
Power Limit Limits mechanical work performed by the robot.
Stopping
Time Limit
Limits maximum time the robot uses for stopping after a robot stop is
initiated.
Stopping
Distance
Limit
Limits maximum distance travelled by the robot after a robot stop is
initiated.
Safety Function When performing the application risk assessment, it is necessary to take into account
the motion of the robot after a stop has been initiated. In order to ease this process, the
safety functions
Stopping Time Limit
and
Stopping Distance Limit
can be used.
These safety functions dynamically reduces the speed of the robot motion such that it
can always be stopped within the limits. The joint position limits, the safety planes and
the tool/end effector orientation limits take the expected stopping distance travel into
account i.e. the robot motion will slow down before the limit is reached.
The functional safety can be summarized as:
UR10e 30 User Manual
2.Safety
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










