Caution
CAUTION
Analog Inputs are not protected against over voltage in current mode.
Exceeding the limit in the electrical specification can cause permanent
damage to the input.
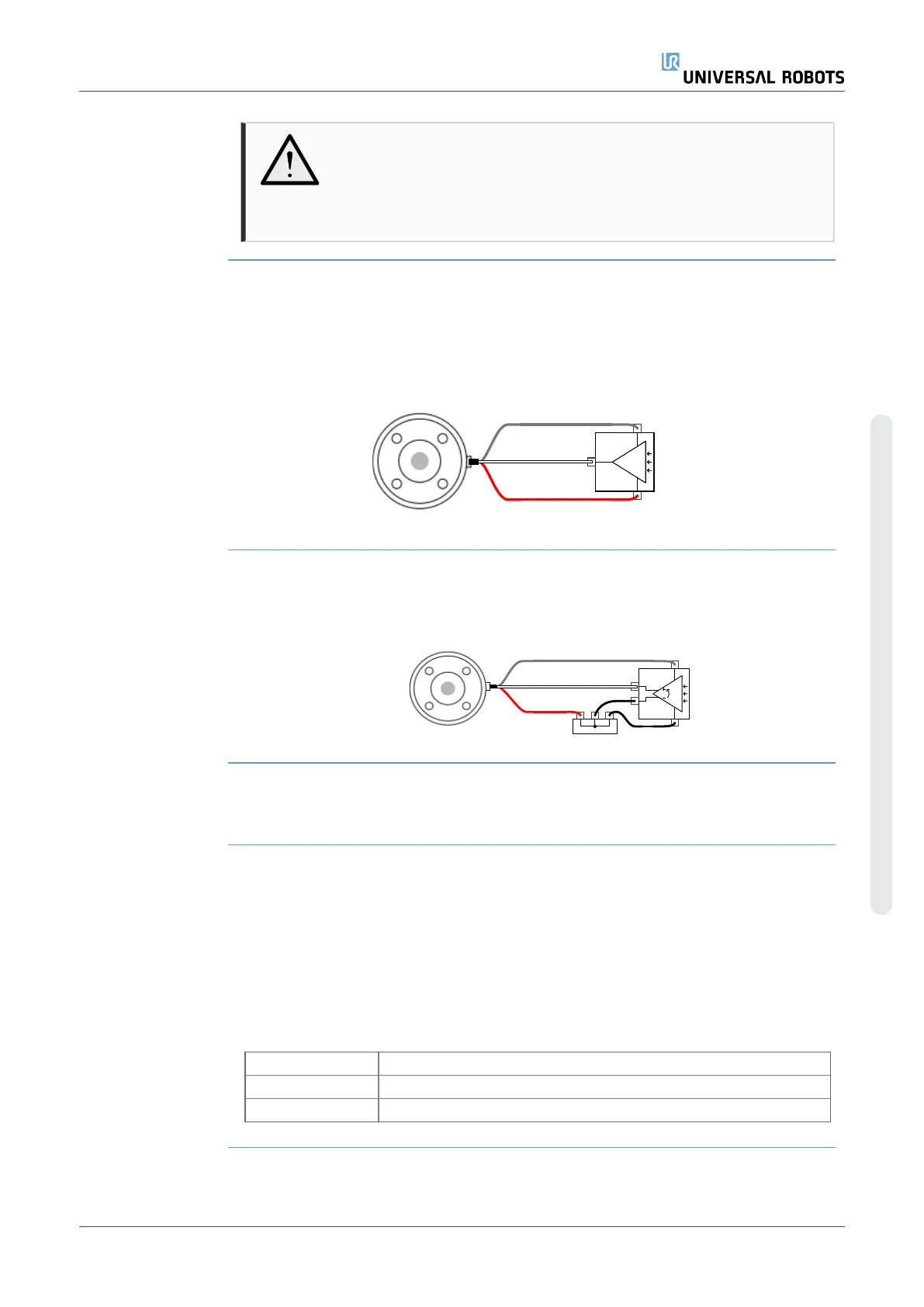
Using Tool
Analog Inputs,
Non-differential
This example shows an analog sensor connection with a non-differential output. The
sensor output can be either current or voltage, as long as the input mode of that Analog
Input is set to the same on the I/O tab.
Note: You can check that a sensor with voltage output can drive the internal resistance
of the tool, or the measurement might be invalid.
Using Tool
Analog Inputs,
differential
This example shows an analog sensor connection with a differential output. Connecting
the negative output part to GND (0V), works in the same way as a non-differential
sensor.
4.18. Tool Communication I/O
Description
•
Signal requests The RS485 signals use internal fail-safe biasing. If the
attached device does not support this fail-safe, signal biasing must either be
done in the attached tool, or added externally by adding pull-up resistors to
RS485+ and pull-down to RS485-.
•
Latency The latency of messages sent via the tool connector ranges from 2ms
to 4ms, from the time the message is written on the PC to the start of the
message on the RS485. A buffer stores data sent to the tool connector until the
line goes idle. Once 1000 bytes of data have been received, the message is
written on the device.
Baud Rates 9.6k, 19.2k, 38.4k, 57.6k, 115.2k, 1M, 2M, 5M
Stop Bits 1, 2
Parity None, Odd, Even
User Manual 69 UR10e
4. Electrical Interface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










