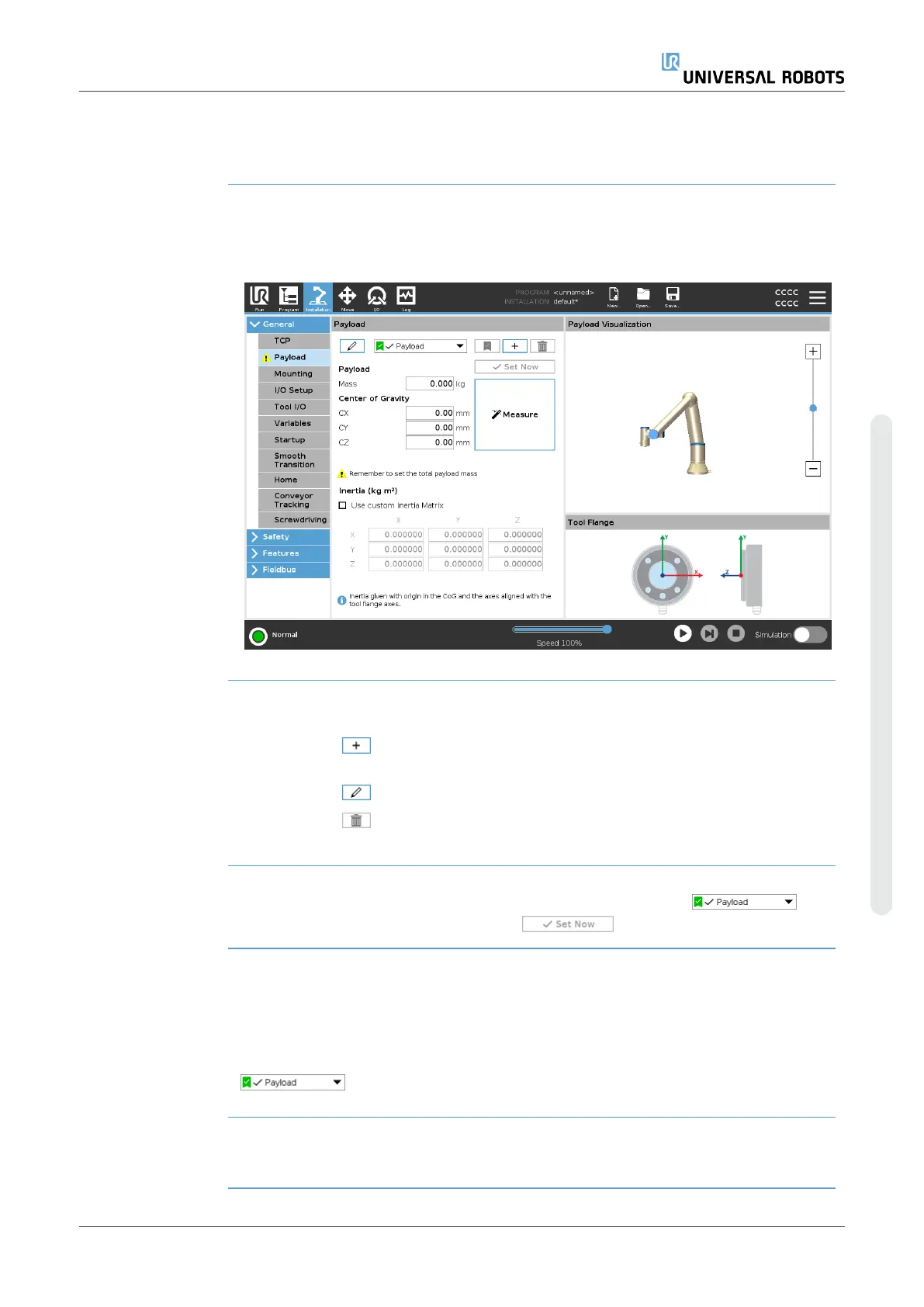
20.2. Payload
Description You must set the Payload, the CoG and the inertia for the robot to perform optimally.
You can define multiple Payloads, and switch between them in your program. This is
useful in Pick and Place applications, for example, where the robot picks up and
releases an object.
Adding,
Renaming,
Modfying and
Removing
Payloads
You can start configuring a new Payload with the following actions:
•
Tap the to define a new Payload with a unique name. The new payload is
available in the drop-down menu.
•
Tap the to rename a Payload.
•
Tap the to remove a selected Payload. You cannot remove the last Payload.
Active Payload
The checkmark in the drop-down indicates which payload is active . The
active Payload can be changed using the .
Default Payload The default Payload is set as the active Payload before the program starts.
•
Select the desired Payload and tap Set as default to set a Payload as the
default.
The green icon in the drop-down menu indicates the default configured Payload
.
Setting the
Center of Gravity
Tap the fields CX, CY and CZ to set the center of gravity. The settings apply to the
selected Payload.
User Manual 281 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










