Move: Use joint
angles
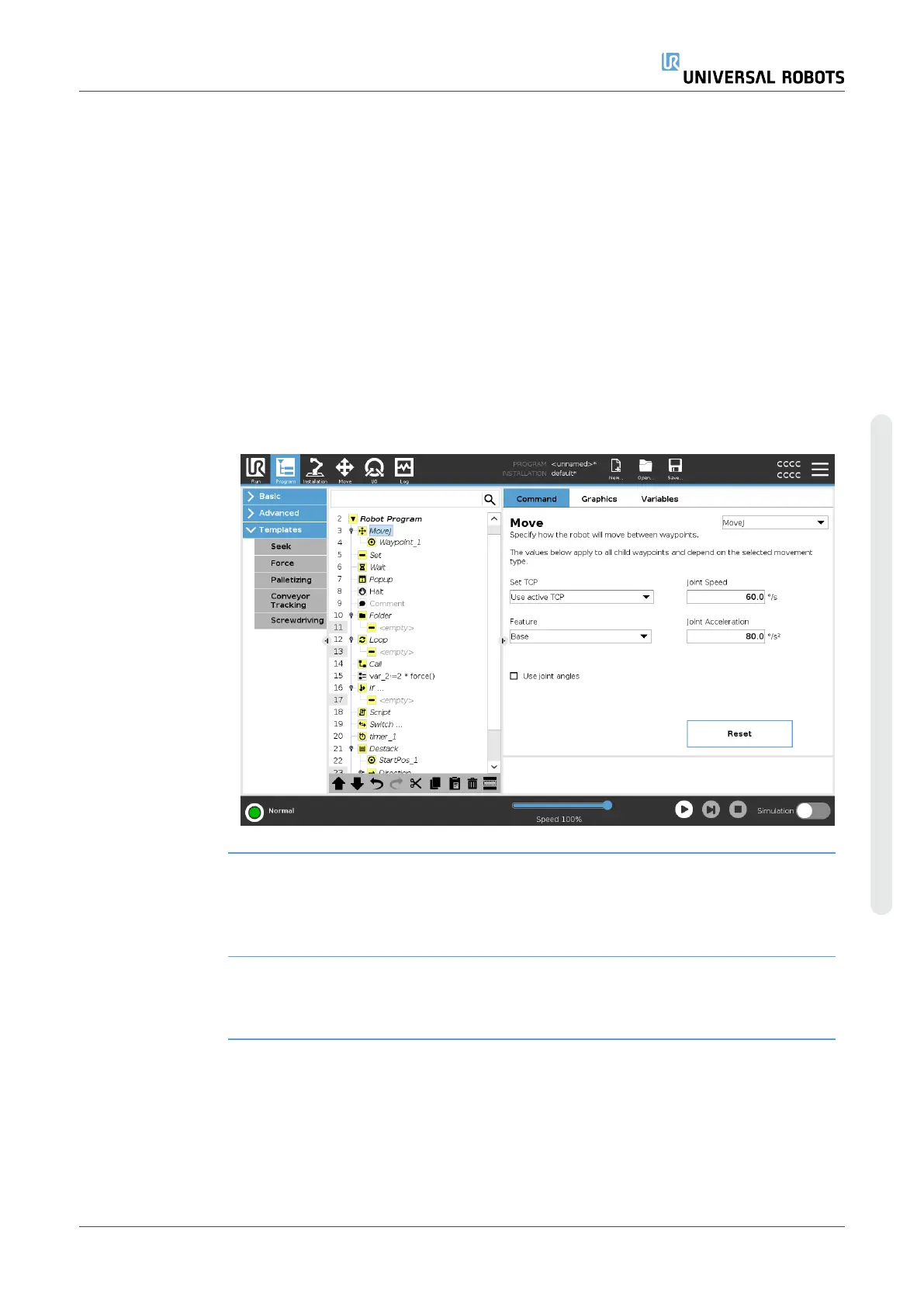
You can use the Use joint angles as an alternative to the 3D pose when you are using
MoveJ to define a waypoint.
Waypoints defined using the Use joint angle are not changed when a program is moved
between robots.
This is useful if you are installing your program in a new robot.
Using Use joint angles makes the TCP option unavailable.
Move: Shared
Parameters in a
Move Command
The shared parameters in the bottom right corner of the Move screen apply to the
movement from the previous position of the robot arm to the first waypoint under the
command, and from there to each of the following waypoints.
The Move command settings do not apply to the path going
from
the last waypoint
under that Move command.
19.7.2. Waypoints
Description Waypoints are one of the most central parts of a robot program, telling the robot arm
where to go one movement at a time.
Add Waypoints
A waypoint accompanies a Move, so adding a Move is required for the first waypoint.
User Manual 199 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










