Description The different feature options in the Move pane allow you to add detail to a Move and
the attached waypoint/s.
Use these options to customize your program
See the Move pane features below:
Move: Set TCP Use this setting, if you need to change TCP during the robot program execution. This is
useful if you need to manipulate different objects in the robot program.
The way the robot moves is adjusted depending on which TCP is set as an active TCP.
Ignore Active TCP allows this movement to be adjusted in relation to the Tool Flange.
Set the TCP in a
Move
To set the TCP in a Move
1. Access the Program Tab screen to set the TCP used for waypoints.
2. Under Command, in the drop down menu on the right select the Move type.
3. Under Move, select an option in the Set TCP drop down menu.
4. Select Use active TCP or select a user defined TCP.
You can also choose Ignore Active TCP.
Move: Feature Feature is an option in the Move pane. Use Feature between waypoints for the program
to remember the tool coordinates.
This is useful when you are setting the waypoints (see 20.13 Featureson page299).
See the different Features below.
Feature You can use Feature in the following circumstances:
•
Feature has no effect on relative waypoints. The relative movement is always
performed with respect to orientation of the Base.
•
When the robot arm moves to a variable waypoint, the Tool Center Point (TCP)
is calculated as the coordinates of the variable in the space of the selected
feature. Therefore, the robot arm movement for a variable waypoint changes if
another feature is selected.
•
You can change a feature’s position while the program is running by assigning a
pose to its corresponding variable.
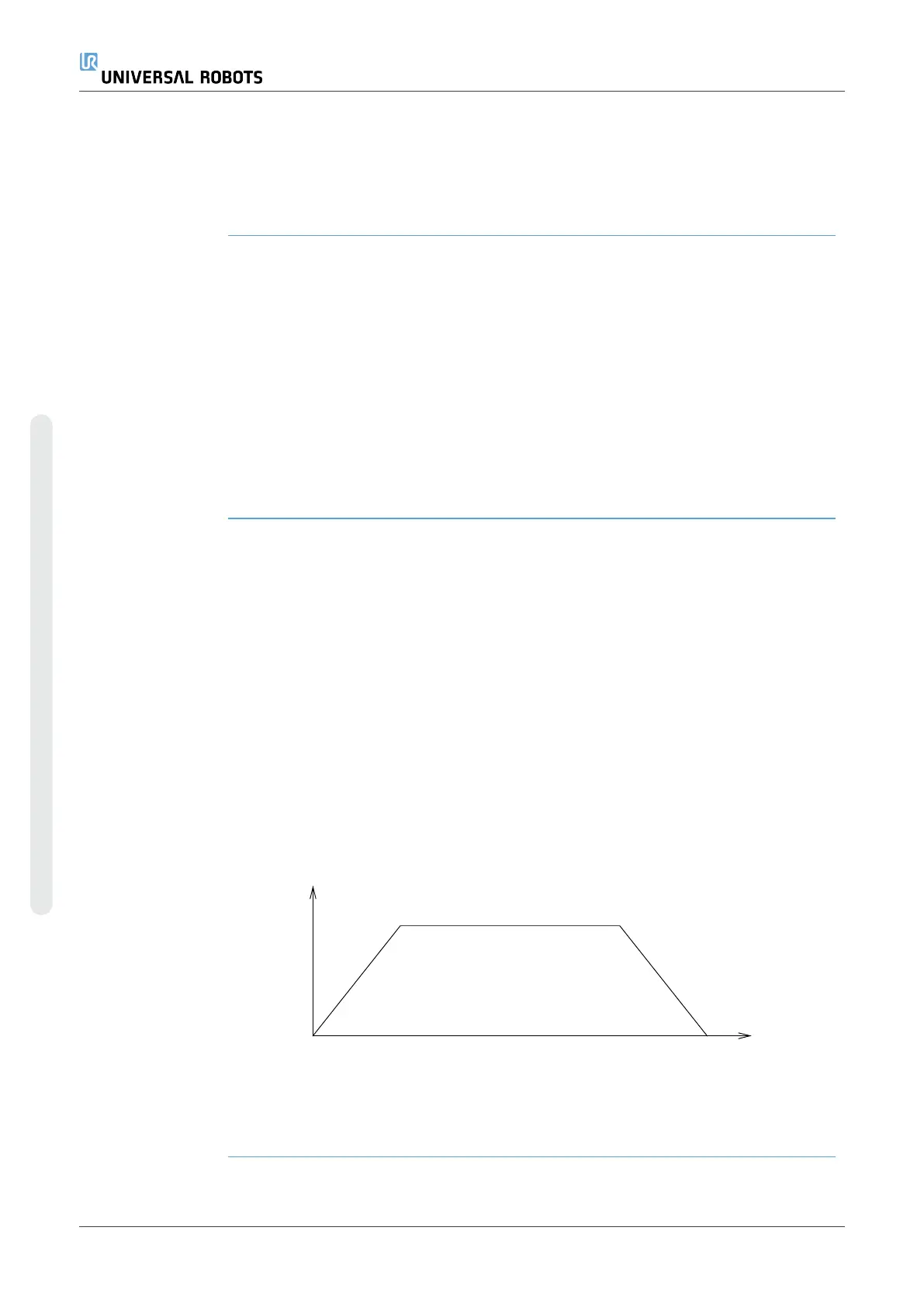
Time
Speed
Acceleration
Cruise
Deceleration
30.1:
Speed profile for a motion. The curve is divided into three segments:
acceleration, cruise and deceleration. The level of the cruise phase is given
by the speed setting of the motion, while the steepness of the acceleration
and deceleration phases is given by the acceleration parameter.
UR10e 198 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










