19.7. Basic program nodes
Description Basic program nodes are used to create simple robot applications. Some basic
program nodes are also used to organize your robot program and create comments in
your robot program. This can be quite useful, if it is large robot program.
19.7.1. Move
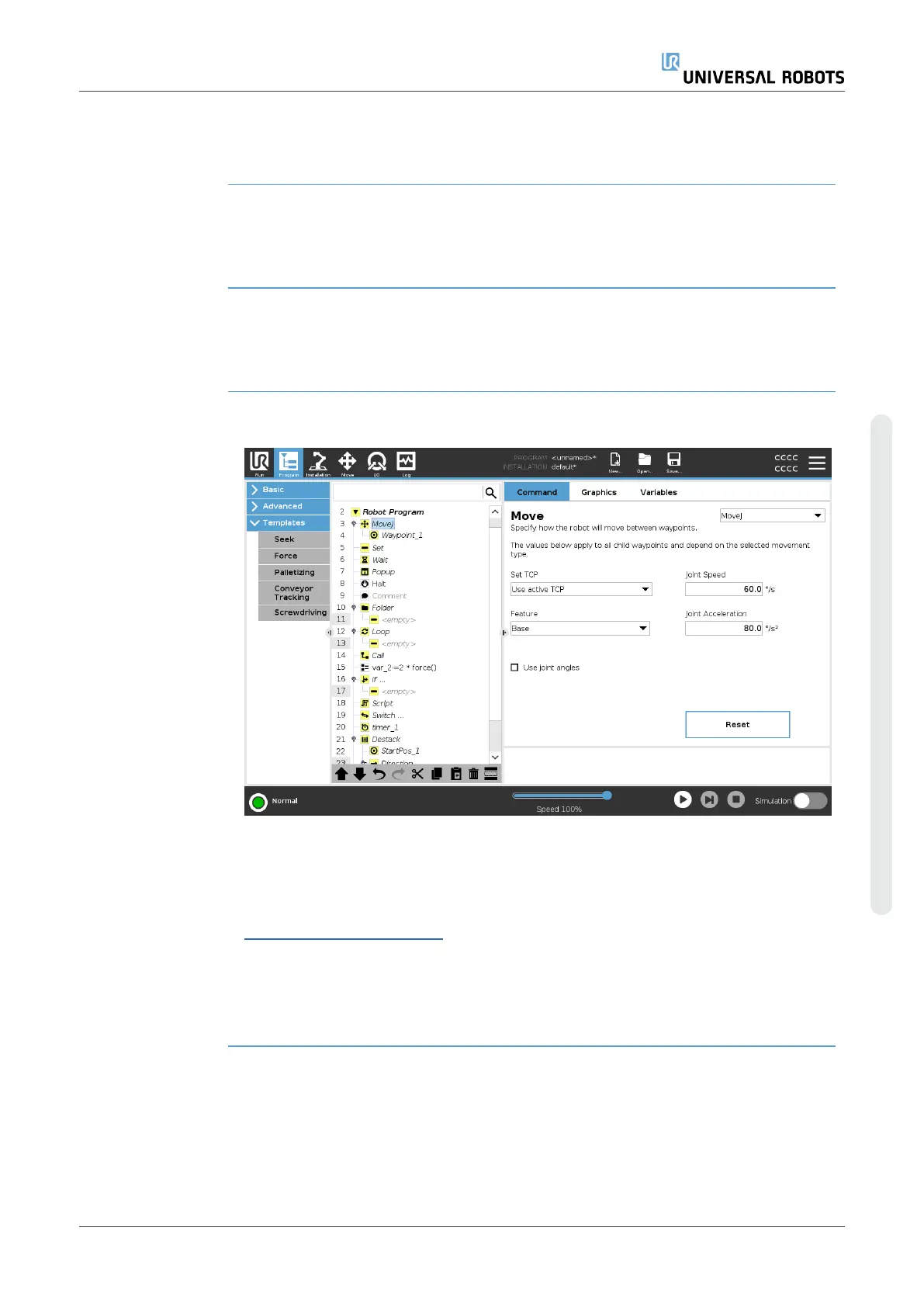
Description The Move command allows the robot to move from point A to point B.
How the robot moves is important to the task the robot is performing.
When you add a Move to your program tree, the Move pane appears to the right of the
screen.
The Movecommand controls the robot's motion via waypoints.
Waypoints are automatically added when you add Move commands to a program.
Read more about Waypoints.
You can also use Moves to set acceleration and speed for the robot arm's movement
between waypoints.
The robot moves using four Move commands. See the Move command types below:
MoveJ The MoveJ command creates a movement from point A to point B that is optimal for the
robot.
The movement may not be a direct line between A and B, but optimal for the start
position of the joints and the end position of the joints.
User Manual 195 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










