Parameter Details
12
12.8 H: Terminal Function Selection
YASKAWA SIEPC71061753C GA500 Technical Manual 677
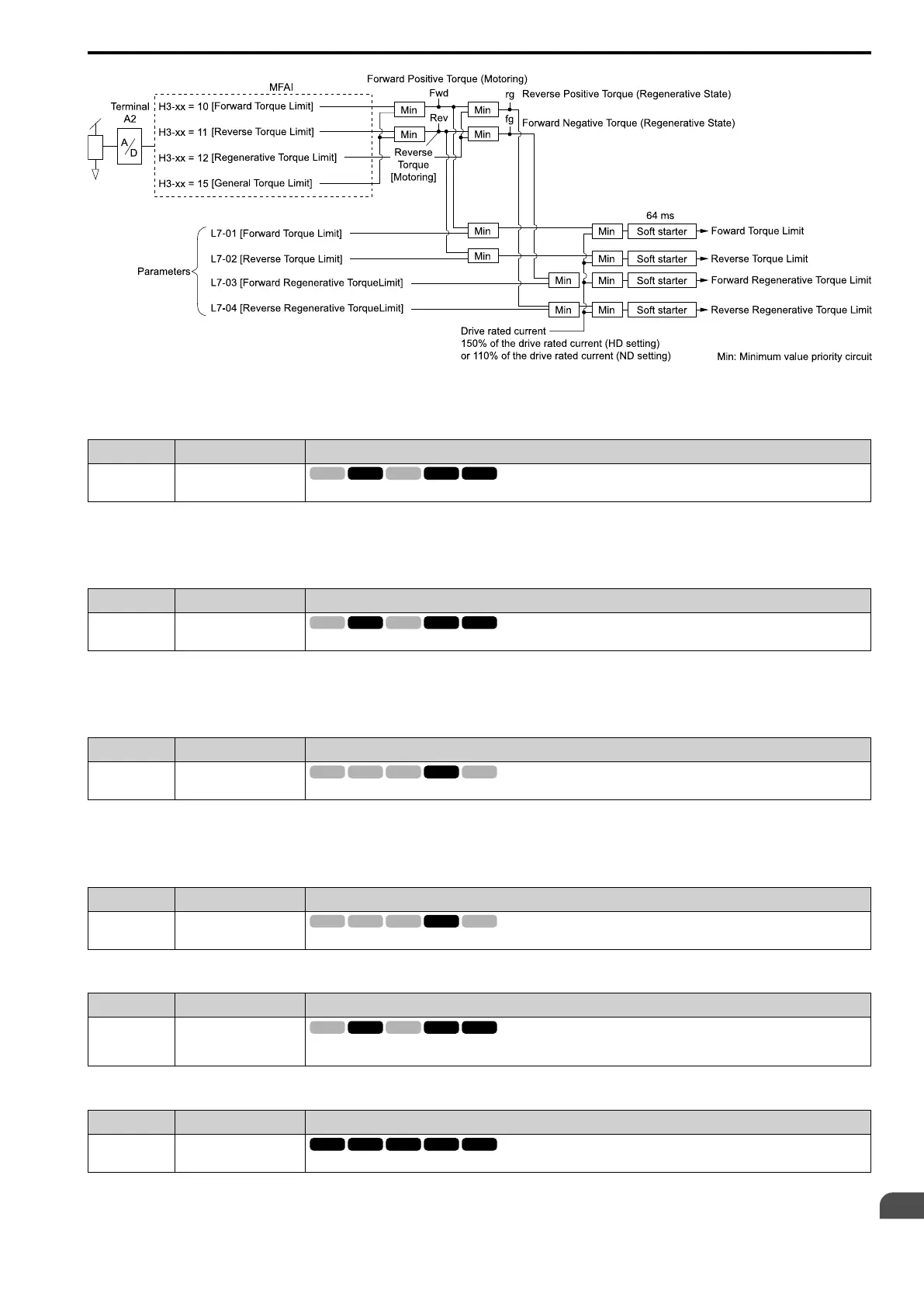
Figure 12.97 Torque Limits from Parameters and Analog Inputs
■ 11: Reverse Torque Limit
Setting Value Function Description
11 Reverse Torque Limit
Enters the load torque limit if the motor rated torque is 100%.
Note:
When you use L7-01 to L7-04 and analog inputs to set torque limits for the same quadrant, it will enable the lower torque limit.
■ 12: Regenerative Torque Limit
Setting Value Function Description
12 Regenerative Torque Limit
Enters the regenerative torque limit if the motor rated torque is 100%.
Note:
When you use L7-01 to L7-04 and analog inputs to set torque limits for the same quadrant, it will enable the lower torque limit.
■ 13: Torque Reference / Torque Limit
Setting Value Function Description
13 Torque Reference / Torque
Limit
Enters the torque reference if the motor rated torque is 100%. This setting is the torque limit for speed control.
Note:
When you use L7-01 to L7-04 and analog inputs to set torque limits for the same quadrant, it will enable the lower torque limit.
■ 14: Torque Compensation
Setting Value Function Description
14 Torque Compensation
Enters the torque compensation value if the motor rated torque is 100%.
■ 15: General Torque Limit
Setting Value Function Description
15 General Torque Limit
Enters the torque limit that is the same for all quadrants for forward, reverse, and regenerative operation if the motor rated
torque is 100%.
■ 16: Differential PID Feedback
Setting Value Function Description
16 Differential PID Feedback
Enters the PID differential feedback value if the full scale analog signal (10 V or 20 mA) is 100%.
The drive uses the deviation between the PID feedback and the differential feedback value signals to calculate the
PID input.