8 - 53
8 Pulse Output Units
NX-series Position Interface Units User’s Manual (W524)
8-10 Functions
8
8-10-2 Pulse Output Method
The Pulse Output Unit has two pulse output methods that you can select based on the motor that you
use.
Use the Pulse Output Method parameter to change the pulse output.
The number of pulses that are output is counted inside the Pulse Output Unit. This value can be moni-
tored by the Controller as the command current position. The command current position is counted by a
signed, 32-bit ring counter.
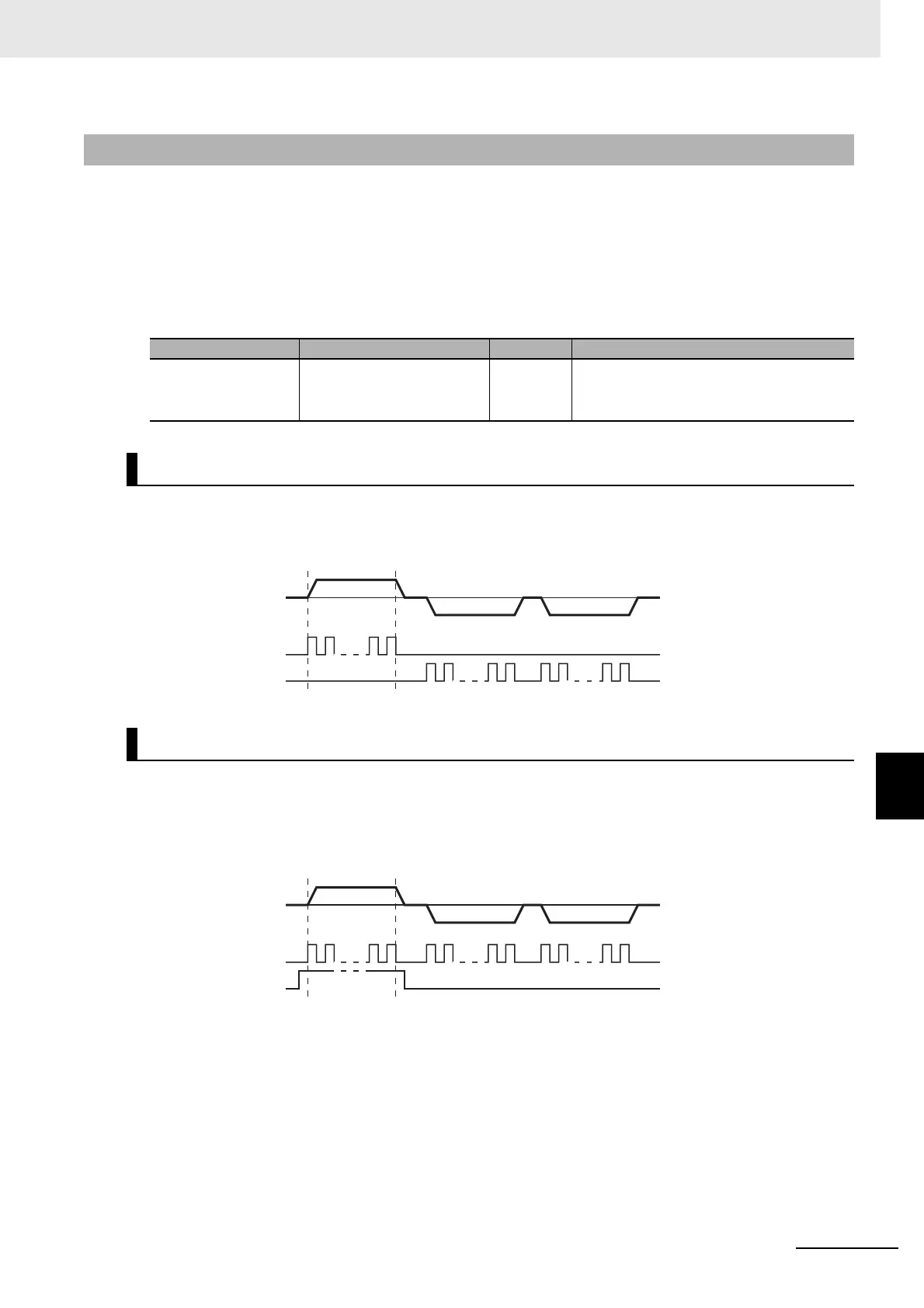
To rotate the motor forward, pulses are output from the CW terminal (pulse output A). To rotate the
motor in reverse, pulses are output from the CCW terminal (pulse output B).
To rotate the motor in the forward direction, pulses are output from the PLS terminal (pulse output A)
while the DIR output terminal (pulse output B) is ON. To rotate the motor in the reverse direction, pulses
are output from the PLS terminal (pulse output A) while the DIR output terminal (pulse output B) is
turned OFF.
8-10-2 Pulse Output Method
Parameter name Setting Default Remarks
Pulse Output Method 0: Forward/reverse direction
pulse
1: Pulse + direction
0 Changes are applied when the power sup-
ply to the NX Unit is turned ON or the NX
Unit is restarted.
Forward/Reverse Direction Pulse
Pulse + Direction
Motor operation
CW terminal
CCW terminal
Forward direction
Reverse direction
Motor operation
PLS terminal
DIR terminal
Forward direction
Reverse direction

 Loading...
Loading...





