MV_REL
MC_MoveRelative
Axis Axis
Done
Busy
Active
CommandAborted
Error
ErrorID
Execute
Distance
Velocity
Acceleration
Deceleration
Jerk
BufferMode
IMD_STP
MC_ImmediateStop
Axis Axis
Done
Busy
CommandAborted
Error
ErrorID
Execute
StopMode
StartPg
MoveStart RunOutput End0 Imd_Stp_D
Lock0
Start0
_EC_PDSlavTbl[MC_Axis000.Cfg.NodeAddress] _EC_CommErrTbl[MC_Axis000.Cfg.NodeAddress]
Lock0
MC_Axis000
RunOutput
PWR
MC_Power
Axis Axis
Status
Busy
Error
ErrorID
Enable
MC_Axis000
Start0
Mv_Rel_D
Start0
InPosition End0
MC_Axis000
Move_Distance
Move_Velocity
Move_Acc
Move_Dec
MC_Axis000
MC_Axis000
MC_Axis000
Mv_Rel_D
DrvEmInput Stop0
Imd_Stp_D
Reset_D
ResetDrvErr
Stop0
ResetOn
MC_Axis000
MC_Axis000
RESET
MC_Reset
Axis Axis
Done
Busy
Failure
Error
ErrorID
Execute
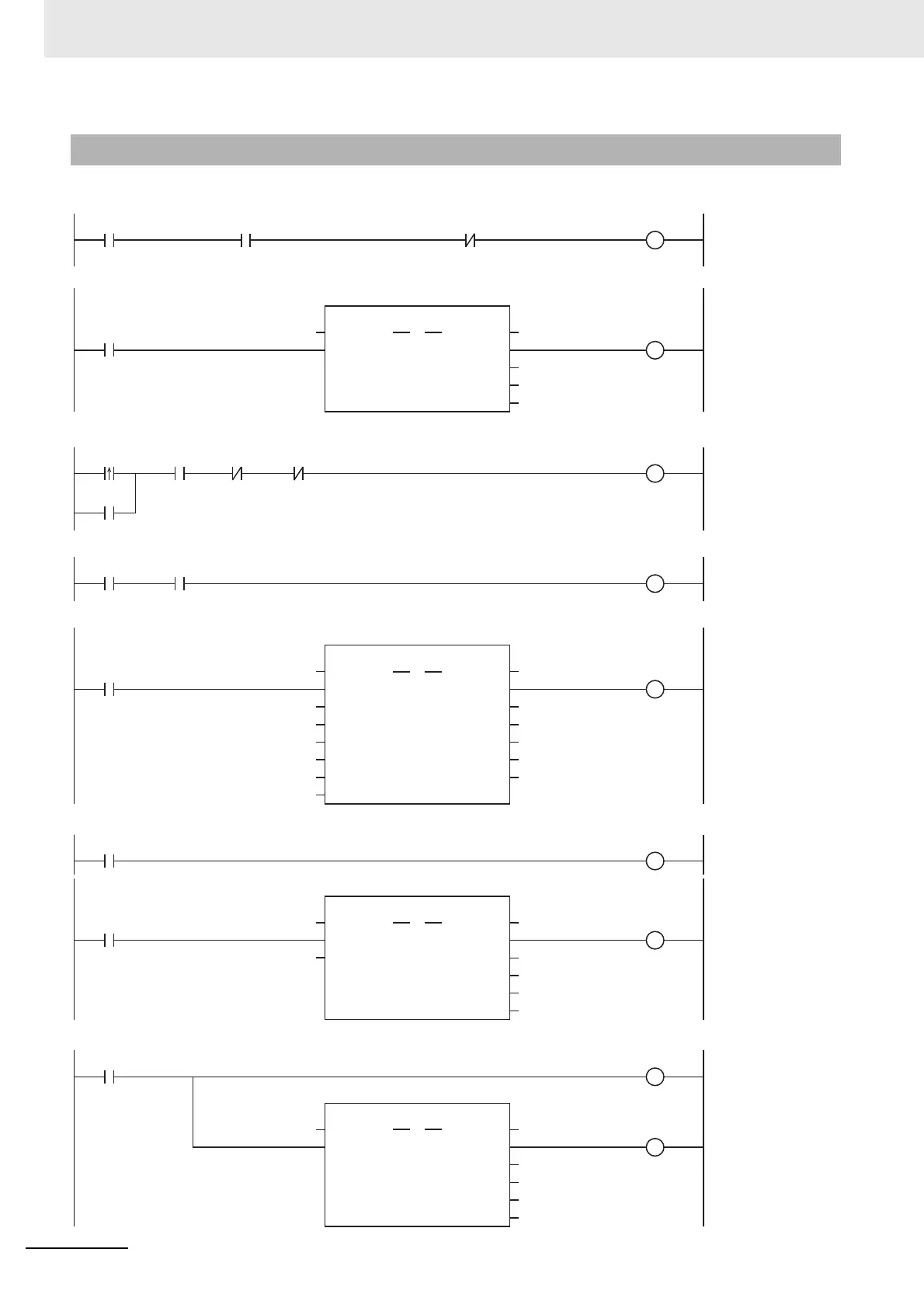
If the StartPg input is TRUE, the status of process data communications is checked to see if communications are active and normal.
If process data communications are active and normal, the Servo for axis 0 is turned ON and the RunOutput output is turned ON.
If the MoveStart input changes to TRUE, the positioning execution condition, Start0, changes to TRUE.
When the relative positioning instruction is completed and the InPosition input changes to TRUE, the positioning completion condition, End0,
If the positioning execution condition, Start0, is TRUE, relative positioning is executed.
If the DrvEmInput input is TRUE, the Immediate Stop (MC_ImmediateStop) instruction is executed and positioning is stopped immediately.
If the ResetOn input is TRUE, the ResetDrvErr output changes to TRUE and the error in the MC Function Module is reset.

 Loading...
Loading...





