7 Programming
7 - 12
NX-series Safety Control Unit User’s Manual (Z930)
7-2 Variables
In the Safety CPU Unit, variables are used to exchange I/O information with external devices, to per-
form data calculations, and to perform other processes.
This section describes variable designations in detail.
Variables store I/O data for exchange with external devices or temporary data that is used for internal
POU processing. A variable has attributes, such as a name and data type.
You do not need to assign a memory address to a variable. The Sysmac Studio automatically allocates
memory addresses in the memory area for variables.
Variables are broadly classified into the following two types.
User-defined Variables
The user defines all of the attributes of a user-defined variable. The rest of this section describes
user-defined variables.
Semi-user-defined Variables
For semi-user-defined variables, some attributes are designed by the system, while others are
defined by the user. This includes variables that are used to access specific devices and data. This
is the equivalent of a device variable in the Safety Control Unit.
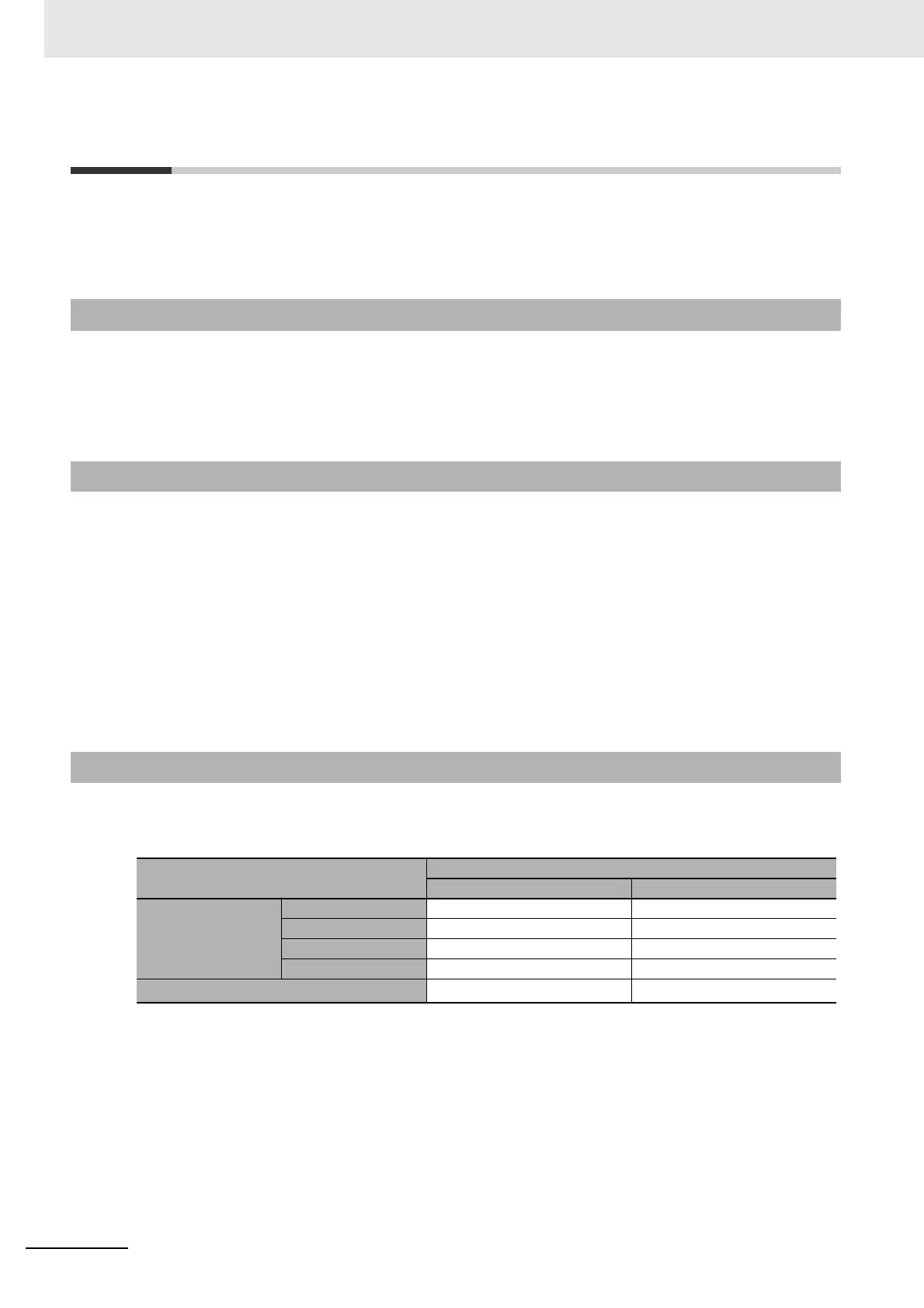
There are five types of user-defined variables as defined according to their function in a POU.
OK: Definable.
7-2-1 Variables
7-2-2 Types of Variables
7-2-3 Types of User-defined Variables
Type of user-defined variable
POU type
Programs Function blocks
Local variables
Internal variables OK OK
Input variables None OK
Output variables None OK
External variables OK None
Global variables
OK
*1
*1. You can define global variables as external variables to access the global variables through the ex-
ternal variables.
None