30.7Sonarcrosstalkinterference
Thereare2typesofpotentialsonarcrosstalk
interferenceinaRaymarinesonarsystem:
1.SideVisionsonarcrosstalkinterference
2.Multiplesonarcrosstalkinterference
Thetypesofcrosstalkinterferencethatyou
mayexperienceinyoursystemdependonthe
combinationandtypeofsonarequipmentinstalled,
andthewayinwhichtheequipmenthasbeen
installed.
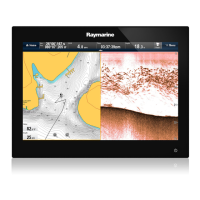
SideVisionsonarcrosstalk
interference
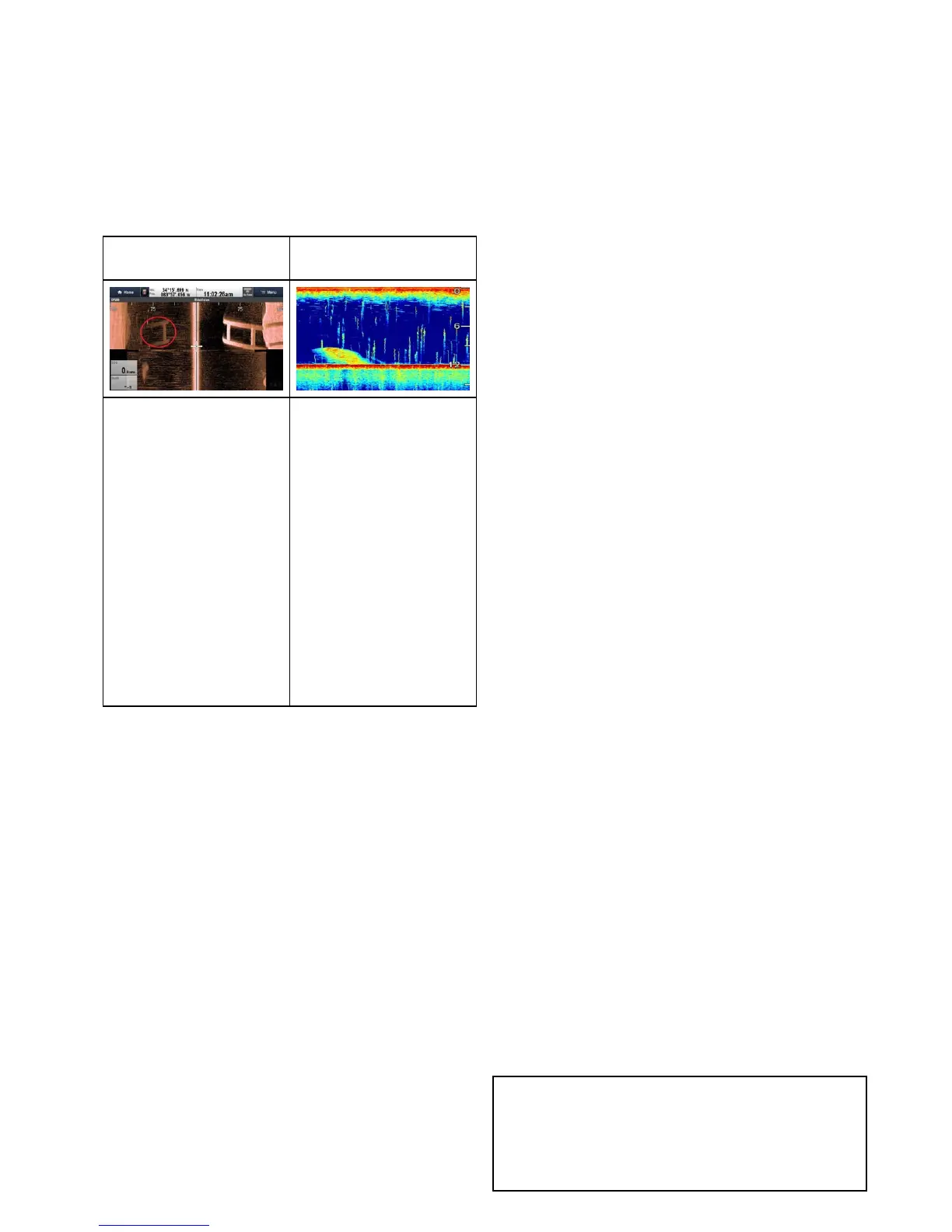
Multiplesonarcrosstalk
interference
Duetothehighsensitivity
ofSideVisiontransducers,
youmayexperiencesome
minorcrosstalkinterference
betweentheleftandright
receivingchannelsinareas
ofstrongtargetreturns.
Examplesofstrongtarget
returnsincludesolidobjects
suchasunderwaterbridge
structure.Thisinterference
showsupintheFishnder
applicationassubtle
reectionsfromtheright
sonarimagedisplayedin
theleftsonarimage,orvice
versa.
Whenusingmultiplesonar
modulesandtransducers
operatinginoverlapping
frequencyranges,youmay
experiencesomecrosstalk
interferencebetweenthe
ranges.Thisinterferenceis
displayedintheFishnder
applicationasvertical“rain
drops”throughoutthewater
column.Thesevertical“rain
drops”indicatethat2sonar
modulesareoperatingin
closefrequencyproximityto
oneanother.
SideVisionsonarcrosstalkinterference
Crosstalkinterferenceisexpectedbehaviorinahigh
sensitivitydevicesuchasaSideVisiontransducer,
andisnotindicativeofafaultwithyourtransduceror
sonarmodule.
Reducingmultiplesonarcrosstalk
interference
Crosstalkinterferenceinsystemswithmultiplesonar
modulesandtransducersistheresultofanumber
offactors,includinginstallation,operation,and
environment.
•Chooseanequipmentcombinationthat
minimizesoverlappingfrequencies.Wherever
possible,choosetousesonarmodulesand
transducersthatoperateindifferentfrequency
ranges(“Channels”),forexampleCP100and
CP300sonarmodulesandCPT-100andB744V
transducers.Thiswillhelptoensurethateach
componentisoperatinginadistinctrelative
frequencyrange–forexample,a“high”frequency
rangefortheCP100anda“low”frequencyrange
fortheCP300.
•Onlyusethesonarchannelsthatyoureally
need.Althoughitispossibletorunmultiplesonar
modulessimultaneouslyinaRaymarinesystem,it
maynotalwaysbenecessarytodoso.Ifyouare
inascenariothatrequiresonlyonesonarmodule
tobeactiveatatime,disableanyothersonar
modulesbychangingtheFishnderapplication
panetoasingleonewhichonlydisplaystheoutput
fromonesonarmodule.Alternatively,disablethe
pingforanyunusedsonarmodulesbyselecting
MENU>Channel>Ping>OFFintheFishnder
application.
•Identifythesonarmoduleandtransducerthat
iscausingtheinterference.T odothis,disable
thepingorremovethepowerforoneofthesonar
modulesinyoursystem.Iftheinterferenceinthe
Fishnderapplicationdisappearsimmediately,
younowknowwhichdeviceiscausingthe
interference.Iftheinterferencedoesn’tdisappear,
repeattheexerciseagainwiththeothersonar
module(s)inyoursystem,oneatatime.Onceyou
knowwhichdeviceiscausingtheinterference,
proceedwiththefollowingmethodstoreducethe
interferencefromtherelevantdevice.
•AdjusttheInterferenceRejectionFilter.The
defaultsettingforallRaymarineMFDsis“Auto”.
Changingthissettingto“High”mighthelpto
reduceinterference(MENU>Setup>Sounder
Setup>InterferenceRejection).Notethatthe
InterferenceRejectionFiltersettingisnotavailable
forallsonarmodules.
•Decreasethepoweroutputoftheinterfering
transducer.Adjustingthe“PowerMode”in
theSensitivitySettingsintheMFD’sFishnder
applicationcanhelptominimizethepresence
ofcrosstalkinterference(MENU>Sensitivity
Settings>PowerMode).NotethatthePower
Modesettingisnotavailableforalltransducers.
•EnsurethatyouhaveacommonRFground
pointforallelectricalequipmentonyour
vessel.OnvesselswithoutanRFgroundsystem,
ensureallproductdrainwires(whereavailable)
areconnecteddirectlytothenegativebattery
terminal.IneffectiveRFgroundingcancause
electricalinterferencewhichmayinturnresultin
sonarcrosstalkinterference.
•Increasethephysicaldistancebetweenyour
sonarmodules.Electricalinterferencemaybe
occurringbetweenacableononesonarmodule,
andacableonadifferentsonarmodule.Ensure
thatyoursonarmodulesarephysicallylocatedas
farawayfromeachotheraspossible.
•Increasethephysicaldistancebetweenyour
sonartransducers.Electricaland/oracoustic
interferencemaybeoccurringbetweenthe
differenttransducersinyoursystem.Ensurethat
yourtransducersarephysicallylocatedasfar
awayfromeachotheraspossible.
Note:Giventheeffortandpotentialdifculties
involvedinrelocatingsonarequipment,itshould
onlybeconsideredasalastresortwhenyoujudge
theinterferencetobeasignicantproblemwhich
cannotberesolvedusingthemethodsdescribed
above.
Troubleshooting
401
 Loading...
Loading...