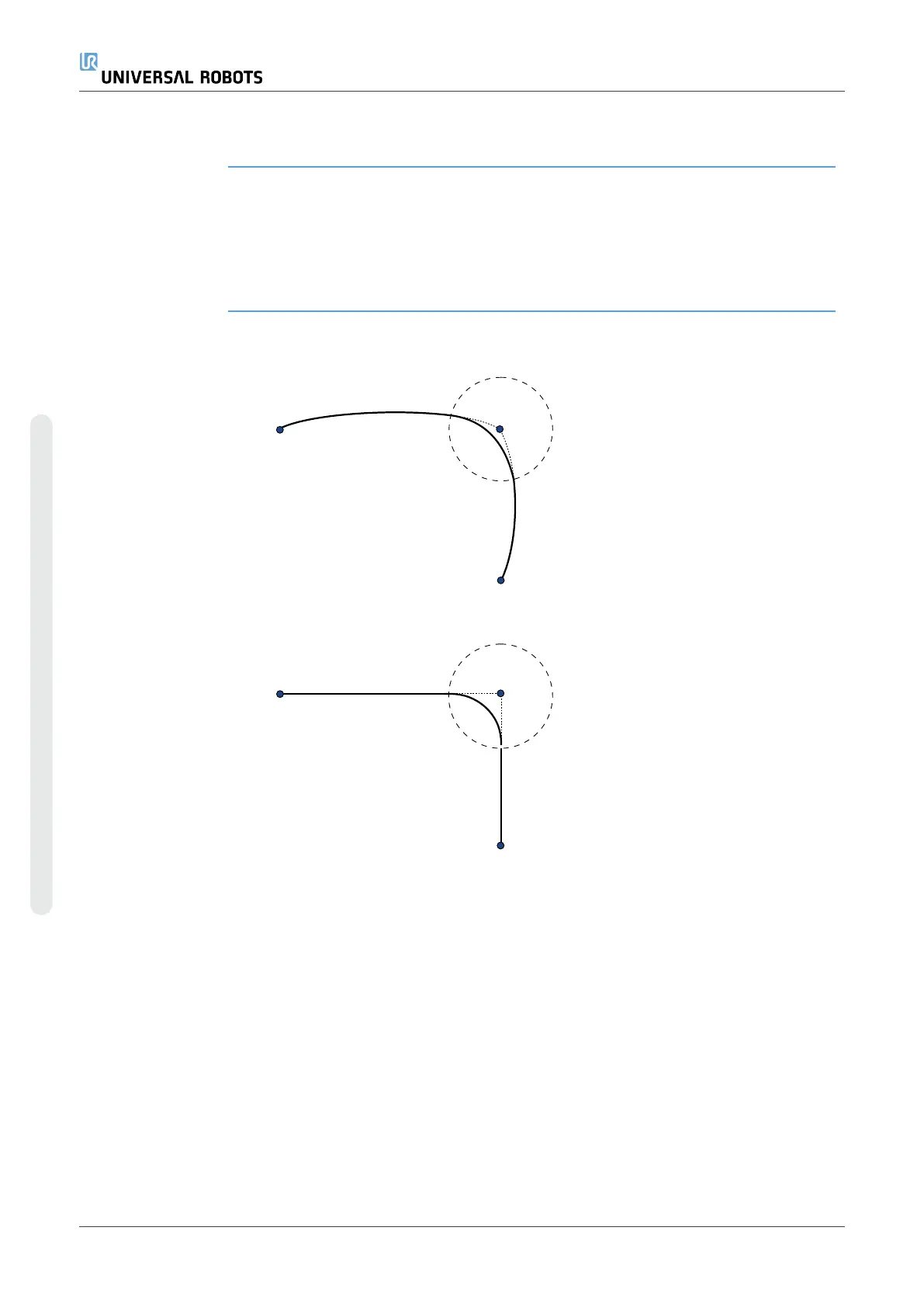
Blend Trajectories
Description Blending enables the robot to smoothly transition between two trajectories, without
stopping at the waypoint between them.
Blending makes your robot program run faster because, when you create a smooth
transition between trajectories, you avoid slowing down an acceleration between
trajectories.
Blend
Trajectories
33.1:
Joint space (MoveJ) vs. cartesian space (MoveL) movement and blend.
UR10e 214 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










