35
(2) Set the overtravel signal
SI3=ON, prohibit the forward running
(default
value)
prohibit the forward running
Always prohibit the forward running
Do not use forward overtravel signal
terminal. The setting method is the same as P-OT.
can be changed to other terminal input via parameter P5
chapter 5-12-1.
2. In position control, there is position offset pulse when stop the motor via overtravel signal. Please
input clear signal /CLR to clear the offset.
3. In position control, if the servo still can receive pulse when stop the motor via overtravel signal,
these pulses will accumulate until the servo alarm.
Notes: below is the default setting of P-OT and N-OT for each type.
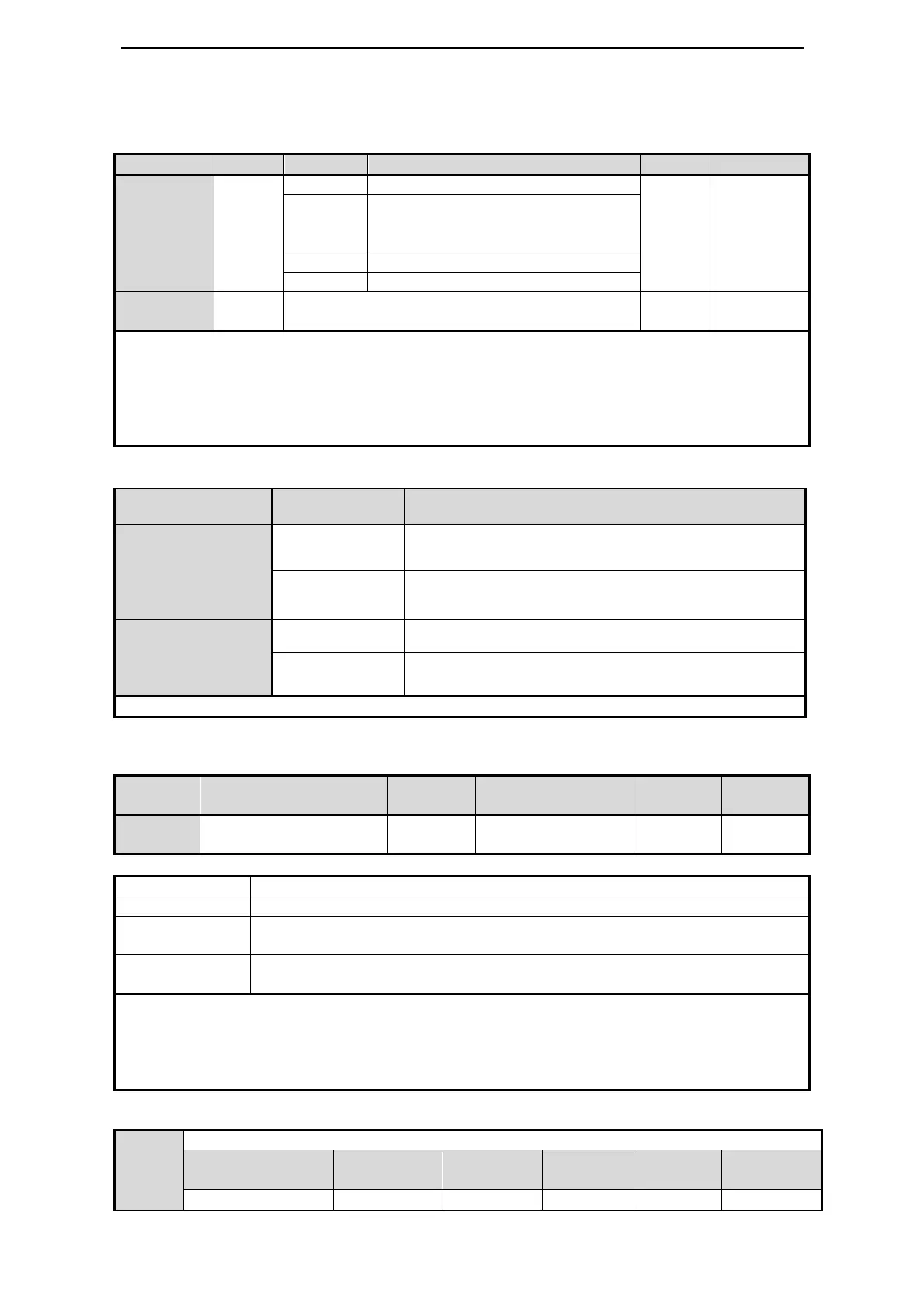
(3) Motor stop mode when use overtravel signal
When use overtravel signal, please set the motor stop mode as the below table:
range
use overtravel signal
OFF
on
Inertia stop. Keep on inertia motion after stop.
2
Decelerate stop. Change to zero clamp state after stop.
Torque setting: P4-06 urgent stop torque
3
Decelerate stop. Change to inertia motion
Torque setting: P4-06 urgent stop torque.
06.H=0,1, servo enable signal will be forced OFF when overtravel signal arrives.
P0-06.H=3, servo enable signal will be forced OFF after motor stop when overtravel signal
arrives. P0-06.H=2, servo enable signal will not be forced OFF as long as the servo enable
signal is always effective.
(2) stop condition depends on rotate checking speed P5-02, unit rpm.
Related parameter settings:
mode
Servo type Parameter Default setting
DS2-20P4-B
DS2-20P7
DS2-20P7-B
DS2-21P5-B
P5-12 n.0000
P5-13 n.0000
DS2-20P7-A
DS2-21P5
DS2-21P5-A
P5-12 n.0003
P5-13 n.0004
As the output terminals are different from each type, the default setting will be

 Loading...
Loading...


